
Page 177 - 《软件学报》2025年第12期
P. 177
5558 软件学报 2025 年第 36 卷第 12 期
表 1 符号和对应描述
u y
Symbol Meaning
x,y 多维时间序列变量和对应的标签
X 多维时间序列变量集合
z d z c
z c 领域不变隐变量
z d 领域变化隐变量
x u 领域
S,T 源域, 目标域
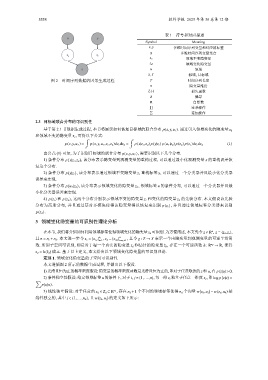
图 2 时间序列数据的因果生成过程 T 时间序列长度
n 隐变量维度
L(·) 损失函数
∂ 偏导
R 自然数
∏
连乘操作
∑
连加操作
2.3 目标域联合分布的可识别性
基于第 2.1 节数据生成过程, 本节将展示如何恢复目标域的联合分布 p(x,y,u T ). 通过引入领域变化的隐变量 z d
和领域不变的隐变量 z c , 可得以下公式:
∫ ∫
p(x,y,u T ) = p(x,y,u T ,z c ,z d )dz c dz d = p(x|z c ,z d ) p(y|z c ) p(u T |z d ) p(z d ) p(z c )dz c dz d (1)
由公式 (1) 可知, 为了识别目标域的联合分布 p(x,y,u T ), 需要识别以下几个分布.
( )
1) 条件分布 p x|z c ,z d , 该分布表示隐变量到观测变量的重构过程, 可以通过最小化观测变量 x 的重构误差恢
复这个分布.
( )
2) 条件分布 p y|z c , 该分布表示通过领域不变隐变量 z c 重构标签 y, 可以通过一个分类器并且最小化分类器
误差来实现.
( )
3) 条件分布 p u T |z d , 该分布表示领域变化的隐变量 , 领域标签 u 的条件分布, 可以通过一个分类器并且最
z d
小化分类器误差来实现.
4) p(z c ) 和 p(z d ), 这两个分布分别表示领域不变的隐变量 z c 和变化的隐变量 z d 的先验分布. 本文假设该先验
分布为高斯分布, 并且通过基对齐模块使得该隐变量得以恢复来识别 p(z c ), 并且通过领域标签分类器来识别
p(z d ).
3 领域变化隐变量的可识别性理论分析
n
在本节, 我们将介绍如何利用领域标签使得领域变化的隐变量 z d 可识别. 为方便阐述, 本文先令 z ∈ R , z = {z d ,z c },
{ } n c { } n
且 n = n c +n d . 本文进一步令 z c = z c,i i=1 , z d = z d,i i=n c +1 , 且令 g : Z → X 表示一个由隐变量到观测变量的可逆平滑函
n d
数. 所谓子空间可识别, 则是对于每一个真实的隐变量 z d 和估计的隐变量 , 存在一个可逆函数 h : R → R, 使得
ˆ z d
z d = h(ˆz d ) 成立. 基于以上定义, 本文给出以下领域变化隐变量的可识别理论.
定理 1. 领域变化隐变量的子空间可识别性.
本文遵循图 2 所示的数据生成过程, 并做出以下假设.
1) 光滑且恒为正的概率密度假设: 隐变量的概率密度函数是光滑且恒为正的, 即对于任意取值的 z 和 u, 有 p(z|u)>0.
( )
2) 条件独立性假设: 给定领域标签 u 的条件下, 对于 i, j ∈ {1,...,n}, 每一维 z i 独立于任意一维度 , 即 log p z|u =
z j
∑
p(z i |u).
)
(
n d w z d ,u j −w(z d ,u 0 ) 是
3) 线性独立假设: 对于任意的 z d ∈ Z d ⊆ R , 存在 n d +1 个不同的领域标签使得 n d 个向量
( )
线性独立的, 其中 j ∈ {1,...,n d }, 且 w z d ,u j 的定义如下所示: