
Page 367 - 《软件学报》2025年第8期
P. 367
3790 软件学报 2025 年第 36 卷第 8 期
稀缺的目标域预测问题的一种有效方法 [24] . Wang 等人 [9] 提出了一种城市人流预测的跨域时空知识转移的深度注
意适应网络, 源域和目标域通过共享的 Conv-LSTM 层学习时空数据表示, 结合注意机制捕获更广泛的空间相关
性, 学习到的表示映射到一个共同的特征空间, 通过最大平均差异进行知识转移. Li 等人 [10] 为了解决数据不足的
问题, 提出一个基于迁移学习的通用流量预测框架, 使用堆叠的 LSTM 构建网络模型以捕捉数据中的高维非线性
关系, 再应用 3 种不同的迁移策略, 结合交通流模式和地理属性进行迁移流量预测, 提高了模型预测精度. Wan 等
人 [11] 针对网络流量预测中样本量小的问题, 提出了一种基于 LSTM 和迁移学习的神经网络模型, 构建 LSTM 网
络, 并对其进行训练, 通过迁移学习将执行源任务的神经网络模型参数转移到执行目标任务的神经网络模型中, 用
少量的目标域数据构建出性能良好的预测模型. Wang 等人 [12] 提出一种深度时空预测任务的跨城市迁移学习方法,
该方法学习一个城市区域匹配函数将目标区域与相似的源区域连接起来, 将 Conv-LSTM 和 Conv2D 叠加以提取
时空依赖关系, 利用匹配函数将学习到的源域知识传递给目标域. Tang 等人 [13] 提出一种域对抗时空网络, 利用图
嵌入和 GRU 相结合的方式得到节点嵌入信息, 采用对抗性域适应的方式将源域的嵌入表示迁移到目标域中, 得到
一种可转移的交通预测模型, 用来提升交通流预测的精度. Ren 等人 [25] 等提出一种深度迁移学习的交通预测模型,
模型采用向量化的方式表达时空数据, 采用深度学习的方式提取交通特征表示, 将其他外部因素赋予相应的权重,
通过迁移学习的方式辅助完成预测任务.
尽管已有大量工作对交通流预测进行研究, 并取得了一定的成果. 然而, 交通流预测仍然面临着如下挑战: 对
于历史观测数据稀缺的图结构的交通路网, 无法准确预测其未来一定时间段的交通流. 对此, 本文提出 TL-
STGCN 模型, 基于结合注意力机制的时空图网络提取交通流时空特征, 采用对抗性域适应的方式进行知识迁移,
以准确地预测目标路网交通流.
2 问题定义
2.1 交通路网
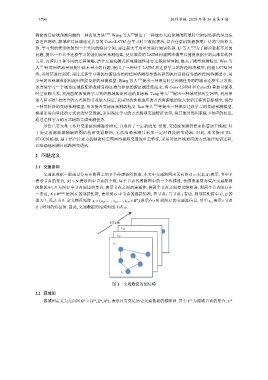
交通流数据一般通过分布在路网上的多个传感器所获取, 本文中交通路网由无向图 G = (V,E,A) 表示, 其中 V
表示节点的集合, |V| = N 表示图中节点的个数, 每个节点代表路网中的一个传感器, 传感器通常布置在交通路网
的路段中; E 为图 G 中节点间边的集合, 表示节点之间的连通性, 若两个节点之间有道路相连, 则两个节点间存在
一条边; A ∈ R N×N 是图 G 的邻接矩阵, 表示图 G 中节点的连接情况, 若节点 与节点 有边, 则邻接矩阵中 (i, j) 的
j
i
(
值为 1, 反之为 0. 定义特征矩阵 x t = x t,1 ,..., x t,i ,..., x t,N ∈ R N ) 表示在 t 时刻图 G 的交通流信息, 其中 x t,i 表示 节点
i
在 t 时刻的特征值. 因此, 交通数据的结构如图 1 所示.
...
时间轴
x t+2
x t+1
x t
x t, i
图 1 交通数据的图结构
2.2 源域图
( )
S S S S S S
源域图定义为无向图 G = V ,E ,A , 表示具有充足历史交通数据的源路网. 其中 V 为源域节点的集合; E