
Page 221 - 《软件学报》2025年第8期
P. 221
3644 软件学报 2025 年第 36 卷第 8 期
v
d
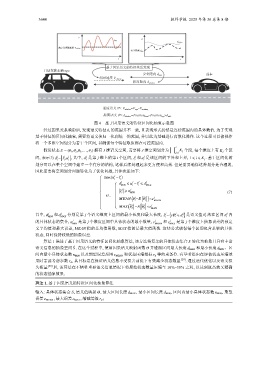
v ego
d relative
预定义巡航速度 V cruising
安全距离 d safe
t t
基于因果语义的特征关系发现
自动驾驶车辆 ego
前车
安全距离 d safe
相对速度 V relative
相对距离 d relative
φ
速度语义 θ v : V relative =V ego −V cruising
φ
距离语义 θ d : d relative =Position front −Position ego >d safe
图 4 基于因果语义的特征区间化抽象示意图
θ i 的范围并不一致, 且表现形式仍然是连续范围内的具体数值. 为了实现
经过因果关系映射后, 发现语义特征
基于特征的区间化抽象, 需要将语义值归一化到统一的范围, 并以此为基础进行离散化操作. 这个过程可以被视作
将一个多维空间划分为若干个区间, 以确保每个特征取值都在可控范围内.
∏ J
假设状态 S = (θ 1 ,θ 2 ,θ 3 ,...,θ J ) 拥有 J 维语义空间, 需要将 J 维空间划分为 K j 个段, 每个维度上有 K j 个区
j=1
[ ]
j
j
j
j
j
j
i
d = l ,u , 其中, d 是第 维上的第 个区间, j u 是该区间的下界和上界, 1 ⩽ i ⩽ K j . 基于区间化的
间, 表示为 i i i i l 和 i
i
划分可以在整个空间中建立一个有序的结构, 这样后续处理起来更方便和高效. 但是需要确保这种划分是合理的,
因此需要将空间划分问题转化为了优化问题, 具体表述如下:
j j
max(u −l )
i i
j j j j
d ⩽ u −l ⩽ d
MIN i i MAX
j
ˆs ⩾ n j
i MIN (7)
s.t. { [ ]}
j j j
MEAN θ s−E ˆ θ s <e
MEAN
( ) [ ]
j j j
MAX ˆ θ s −E ˆ θ s <e
MAX
{ }
j
j
j
j
其中, d j 和 d j 分别是第 j 个语义维度上区间的最小长度和最大长度, ˆ s = s|θ s ∈ d j 是语义值 θ s 落在区间 d 内
MIN MAX i i i
的具体状态的集合, n j 是第 j 个维度区间中具体状态的最小数量, e j 和 e j 是第 j 个维度上抽象误差的预定
MIN MEAN MAX
义平均值和最大误差, MEAN 指的是均值函数, MAX 指的是最大值函数. 这些公式确保每个区间包含足够的具体
状态, 同时保持较低的抽象误差.
算法 1 描述了基于因果语义的特征区间化抽象算法, 该方法将复杂的具体状态集合 S 转化为抽象且具有丰富
d MIN 、区
ˆ S . 在这个过程中, 使用因果语义映射函数
语义信息的抽象空间 Θ 并遵循区间最大长度 d MAX 和最小长度
间内最小具体状态数 n MIN 以及期望误差范围 e MEAN 和状态压缩指标 r d 等约束条件. 有学者提出在评估状态压缩效
果时需要考虑参数 r d , 其目标是在保证语义信息不受损害前提下有效减少状态数量 [20] . 通过迭代优化以及语义损
失衡量 [20] 后, 该算法在不牺牲重要语义信息情况下将原始状态数量压缩至 10%–30% 之间, 以达到既高效又精确
的状态抽象效果.
算法 1. 基于因果语义的特征区间化抽象算法.
输入: 具体状态集合 S, 语义值映射 Θ, 最大区间长度 d MAX , 最小区间长度 d MIN , 区间内最小具体状态数 n MIN , 期望
误差 e MEAN , 最大误差 e MAX , 缩减等级 ;
r d