
Page 208 - 《软件学报》2025年第7期
P. 208
张逍怡 等: 面向智能体路径规划算法的动态随机测试方法 3129
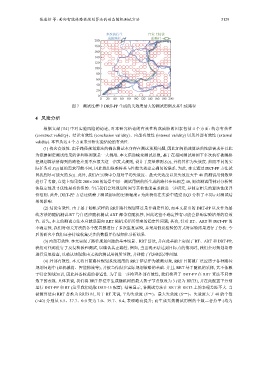
多次执行生 直觉上较优
成的路径 的路径
200
180
160
140
120
100
80
60
40
20
0
0 20 40 60 80 100 120 140 160 180 200
图 7 测试过程中 DRT-PP 生成的失效度最大的测试用例及其生成路径
4 风险分析
根据文献 [54] 中对实验风险的论述, 对本研究结论的有效性构成威胁的因素包括 4 个方面: 构念有效性
(construct validity)、结论有效性 (conclusion validity)、内部有效性 (internal validity) 以及外部有效性 (external
validity). 本节从这 4 个方面来分析实验结论的有效性.
(1) 构念有效性. 由于路径规划算法的确认测试本身存在测试预期问题, 因此如何描述算法的性能需求并以此
为依据制定测试结果的评判准则就是一大挑战. 本文借助蜕变测试思想, 基于在相同测试用例下多次执行被测路
S (t), 并将其作为失效度. 然而不同的实
径规划算法所得到的路径差别不应很大这一启发式规则, 设计了度量准则
S (t) 值的需求可能不同, 因此我们很难将其与性能失效建立确切的联系. 为此, 本文通过 DRT-PP 方法试
际任务对
图找到尽可能大的 S (t). 此外, 我们在实验中分别对平均失效度、最大失效度以及失效度大于 40 的测试用例数量
200×200 的场景中同一测试用例的所生成的路径步长相差 40, 则该测试用例对分析算
进行了考察, 直觉上如果在
法稳定性及寻优性是有价值的. 今后我们会对规划时间等其他性能需求做进一步研究, 并制定相关的算法性能评
价准则. 此外, DRT-PP 方法还依赖于测试剖面的更新幅度 ε 为此我们在实验中通过 RQ3 分析了不同 ε 对测试结
果的影响.
(2) 结论有效性. 由于基于随机采样的 RRT 路径规划算法是非确定性的, 而本文提出的 DRT-PP 以及作为基
线方法的随机测试 RT 与自适应随机测试 ART 都带有随机性, 因此这些不确定性有可能会影响实验结果的有效
性. 首先, 本文的测试方法本身就是面向 RRT 随机采样所带来的稳定性问题; 其次, 针对 RT、ART 和 DRT-PP 的
不确定性, 我们对相关方法的各个配置都进行了多次重复实验, 并采用假设检验的方式对实验结果进行了分析. 今
后的研究中我们还会持续收集更多的数据并持续细化分析结果.
(3) 内部有效性. 本文实现了路径规划问题的基本场景、RRT 算法, 并在此基础上实现了 RT、ART 和 DRT-PP,
我们对代码进行了反复检验和测试, 以确认其正确性. 例如, 当出现无法达到目标点的情况时, 我们会对规划场景
进行反复检查, 以确认该现象由无效的测试用例所导致, 并排除了代码错误等问题.
(4) 外部有效性. 本文将目前路径规划系统通用的 RRT 算法作为被测对象, RRT 目前被广泛应用于各种路径
规划问题中 (如机械臂、智能物流等), 并被当作很多实际规划策略的基础. 并且, RRT 基于随机的采样, 其不依赖
于特定领域知识, 因此具备较强的普适性. 为了进一步检查外部有效性, 我们检查了 DRT-PP 在 RRT 算法不同参
数下的表现. 具体来说, 我们将 RRT 算法中生成随机树的最大孩子节点数设为 3 (记为 RRT3), 并在此配置下分别
运行 DRT-PP 和 RT (这里我们选取 DRT-15 配置). 结果显示, 各测试方法在 RRT 和 RRT3 上的表现差距不大. 当
被测算法由 RRT 替换为 RRT3 时, 对于 RT 来说, 平均失效度 S ( avg )、最大失效度 S ( max )、失效度大于 40 的个数
(>40) 分别从 6.5、37.7、0.0 变为 7.0、39.7、0.4, 表现略有提升; 而生成无效测试用例的个数二者持平 (均为