
Page 205 - 《软件学报》2025年第7期
P. 205
3126 软件学报 2025 年第 36 卷第 7 期
ART5, 但除了 DRT10 与 ART5 的比较结果外, 其余结果不显著; DRT-15 略逊于 ART, 但比较结果不是很显著. 将
来我们会用更多实验数据对其进行比较.
表 2 RQ1 不同 DRT-PP 配置与 RT 的对比的假设检验结果
准则 DRT-05 DRT-10 DRT-15 DRT-20
S avg (40.36, 0.00, √) (15.81, 0.00, √) (14.61, 0.00, √) (22.11, 0.00, √)
S max (1.84, 0.09, ≡) (4.52, 0.00, √) (3.91, 0.00, √) (3.37, 0.00, √)
表 3 RQ1 不同 DRT-PP 配置与 ART3 的对比的假设检验结果
准则 DRT-05 DRT-10 DRT-15 DRT-20
S avg (39.26, 0.00, √) (15.45, 0.00, √) (14.26, 0.00, √) (21.55, 0.00, √)
S max (−0.52, 0.61, ≡) (1.39, 0.18, ≡) (2.31, 0.04, √) (0.39, 0.70, ≡)
表 4 RQ1 不同 DRT-PP 配置与 ART5 的对比的假设检验结果
准则 DRT-05 DRT-10 DRT-15 DRT-20
S avg (39.51, 0.00, √) (15.54, 0.00, √) (14.35, 0.00, √) (21.69, 0.00, √)
S max (−0.11, 0.92, ≡) (2.25, 0.04, √) (2.77, 0.02, √) (1.05, 0.31, ≡)
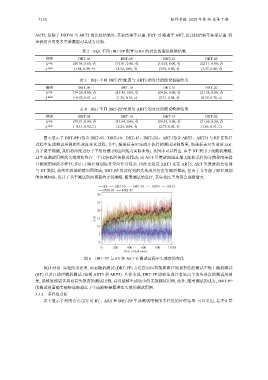
图 6 展示了 DRT-PP (包含 DRT-05、DRT-10、DRT-15、DRT-20)、ART (包含 ART3、ART5) 与 RT 在执行
过程中生成测试用例的失效度变化过程, 其中, 横坐标表示生成并执行的测试用例数量, 纵坐标表示失效度 S (t).
为了便于观测, 我们将曲线进行了平滑处理 (浅色曲线为实际曲线). 从图中可以看出, 由于 RT 采用了纯随机策略,
其生成测试用例的失效度始终在一个比较低的值附近摆动; 而 ART 尽管试图通过增大随机采样的分散程度来提
升测试用例的多样性, 但由于路径规划场景空间非常复杂, 因此无论是 ART3 还是 ART5, ART 失效度的变化都
与 RT 类似, 始终在较低的值周围摆动; DRT-PP 算法得到的失效度尽管也有剧烈摆动, 但由于其考虑了路径规划
的领域知识, 设计了基于测试剖面更新的寻优策略, 随着测试的进行, 其失效度平均值会逐渐增大.
RT DRT-10 DRT-20 ART3 ART5
DRT-05 DRT-15
30
25
20
S (t) 15
10
5
0
0 200 400 600 800 1 000
Size of test cases
图 6 DRT-PP 与 RT 和 ART 在测试过程中失效度的变化
RQ1 结论: 实验结果表明, 动态随机测试 (DRT-PP) 方法在面向智能体路径规划算法的测试中优于随机测试
(RT) 以及自适应随机测试 (包括 ART3 和 ART5). 具体来说, DRT-PP 能够生成具有较高平均失效度的测试用例
集, 能够发现更多具有高失效度的测试用例, 并且能够生成较少的无效测试用例. 此外, 随着测试的进行, DRT-PP
的测试剖面确实能够逐渐趋近于生成能够暴露潜在失效的测试用例.
3.3.2 多样性分析
表 5 展示了利用公式 (27) 对 RT、ART 和 DRT-PP 生成测试用例的多样性的评估结果. 可以看出, 若不计算