
Page 461 - 《软件学报》2025年第4期
P. 461
郗来乐 等: 智能网联汽车自动驾驶安全: 威胁、攻击与防护 1867
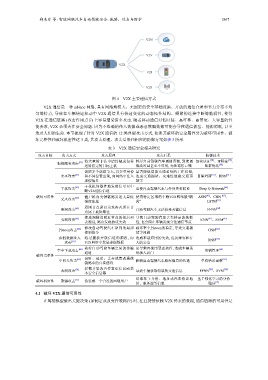
V2N
V2V
V2X
V2I
V2R
图 4 V2X 主要通信方式
V2X 通信是一种 ad-hoc 网络, 具有网络规模大、无固定的安全基础设施、开放的通信介质和节点分布不均
匀等特点, 导致在车辆快速移动中 V2X 通信具有快速变化的动态拓扑结构、频繁的连接中断等脆弱性, 使得
窃听、延迟、丢弃或篡改通信
V2X 在通信链路 (攻击作用点 F) 上容易遭受诸多攻击. 随着移动通信对低时延、高可靠、高带宽、大容量的性
能要求, V2X 必须关注安全问题. 因为不准确的传入数据或恶意欺骗数据可能会导致通信拥塞、能源消耗, 甚至
危及人们的生命. 本节梳理了针对 V2X 通信的 12 类典型攻击方式, 按照其破坏的安全属性分为破坏可用性、破
坏完整性和破坏机密性这 3 类, 其攻击原理、攻击后果和相应的防御方案如表 3 所示.
表 3 V2X 通信安全相关研究
攻击目标 攻击方式 攻击原理 攻击后果 防御技术
[57] 将大量的非法申请封装成包传 耗尽自动驾驶汽车通信资源, 致使通 加密认证 [58] 、IP阻塞 [59] 、
拒绝服务攻击
送给指定的目标主机 信高时延甚至不可用, 无法连接云端 蚁群优化 [60]
创建多个虚拟节点, 以多重身份 显著降低智能交通系统的工作质量,
女巫攻击 [61] 和不同位置出现, 向网络中注入 造成交通拥堵、灾难性道路交通事 自编码器 [61] 、RNN [61]
虚假信息 故等
干扰机间歇性地发射信号以中
干扰攻击 [62] 迫使自动驾驶汽车与外界失去联系 Deep Q-Network [62]
断V2X通信信道
破坏可用性 僵尸机向关键链路发送大量低 使得特定区域的车载V2X网络被“隔 ANN [63] 、CNN [63] 、
交火攻击 [63] [63]
强度流量 离” LSTM
周围节点误以为攻击者所在节 [64]
黑洞攻击 [64] 自动驾驶汽车无法接受关键信息 FFNN
点属于最短路径
使虫洞隧道附近节点的邻居列 导致自动驾驶汽车丢失特定的数据 [65] [65]
[65]
虫洞攻击 KNN 、SVM
表混乱, 路由发现协议失效 包, 也会阻止车辆发现合法通信节点
修改自动驾驶汽车队列的局部 破坏整个Platoon的稳定, 导致交通拥
Platoon攻击 [66] CNN [66]
控制指令 堵等问题
虚假数据注入 通过捕获开放信道的频段, 向 造成车载应用的失效, 危及乘客和行 RNN [67]
攻击 [67] V2X网络中发送虚假数据 人的安全
[68] 劫持自动驾驶车辆之间的传输 误导乘客使用恶意软件, 造成车辆系 [68]
空中下载攻击 通道 统植入后门 密钥管理
破坏完整性
中间人攻击 [69] 影响自动驾驶汽车路况信息的传递 单向哈希函数 [69]
链路中的真实信息
拦截并篡改合作意识信息或基 [70] [70]
[70]
灰洞攻击 导致车辆获取错误的交通信息 FFNN 、SVM
本安全信息等
窃取车主身份、地址或汽车协议地 基于强化学习的身份
破坏机密性 欺骗攻击 [71] 伪装成一个合法的网络用户
址、服务器等信息 验证 [71]
4.1 破坏 V2X 通信可用性
在驾驶模型做出关键决策 (如制定或改变行驶路径) 时, 往往持续依赖 V2X 传来的数据, 通信链路的可用性是