
Page 298 - 《软件学报》2025年第4期
P. 298
1704 软件学报 2025 年第 36 卷第 4 期
现表面的重建. 同样, Yariv 等人 [72] 将体积密度建模为到场景表面的有符号距离函数, 利用累积分布函数 cumulative
distribution function, CDF) 作为 SDF 和体密度之间的变换函数, 不仅能够提供更精确的几何近似, 还能约束不透明
估计误差, 避免表面无采样点的问题. Michael 等人 [73] 提出了统一神经隐式表面和辐射场 UNISURF (unified neural
implicit surface and radiance fields), 构建了一种近似表面渲染的体渲染方法, 利用占用网格对体积和表面进行渲染,
从而更有效地细化物体表面. UNISURF 的流程图如图 12 所示 [73] . 虽然上述方法解决了重建表面粗糙的问题, 但
无法有效地应对稀疏视角下的表面重建问题. SparseNeuS [74] 构建了几何编码器, 通过学习图像特征中的可泛化先
验预测重建曲面的网络编码符号距离函数. 虽然 SparseNeuS 能够实现跨场景的泛化, 但会受到特征体分辨率的影
响. S-VolSDF [75] 利用全局一致性约束将 VolSDF 整合到 MVS 中, 通过 MVS 的预测值对神经体积表面进行正则化
优化, 提高场景重建质量. VolRecon [76] 通过有符号射线距离函数 (SRDF) 实现可泛化的隐式重建, 构建全局特征体,
引入插值特征和沿射线采样点的投影特征计算 SRDF, 进而对密度函数建模.
Neural implicit surface Surface rendering Volume rendering
f θ =t
f θ =t
Our unified rendering
f θ =t
Multi-view images
图 12 UNISURF 流程图 [73]
NeRF 利用隐式辐射场表示场景, 虽然能够更加逼真地实现对场景的呈现, 但其高昂的计算成本也不可忽视.
3D GS (Gaussian splatting) 利用 3D 高斯结合隐式辐射场和显式辐射场的优势对场景建模, 在实现辐射场优化的同
时也减少了计算开销. 2023 年, Kerbl 等人 [77] 提出了 3D Gaussian Splatting, 引入 3D 高斯函数表示场景. 该方法将
高斯函数参数优化和高斯分布密度控制交替进行, 并在优化过程中实现快速的渲染, 从而实现新视图的合成. 因其
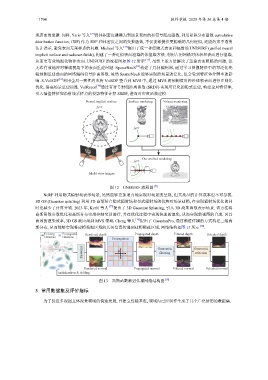
高效的渲染效率, 3D GS 被应用到 MVS 领域. Cheng 等人 [18] 提出了 GaussianPro, 通过渐进传播的方式构建三维高
斯分布, 从而能够实现将建模精细区域的几何信息传递到建模稀疏区域. 网络结构如图 13 所示 [18] .
Existing Propagated Rendered depth Propagated depth Filtered depth Selected depth
Gaussian Gaussian
Propagation
Rasterize Geometric Geometric
selection
filtering
Rendered normal Propagated normal Filtered normal Selected normal
Initialization & Adding
图 13 高斯函数渐进传播网络结构图 [18]
3 常用数据集及评价指标
为了促进多视图立体视觉领域的快速发展, 并建立性能基准, 领域内已经制作生成了几个广泛使用的数据集.