
Page 442 - 《软件学报》2024年第6期
P. 442
3018 软件学报 2024 年第 35 卷第 6 期
π(x)
xϵχ
没有增强
1−p 1 1−p 2
(π) (π)
1 不变 2 不变
原图 p 2
2 (x; λ 2 )
旋转
p 1
1 (x; λ 1 )
旋转操作
裁剪操作
1−p 2
不变
(π) 裁剪
2
p 2
~
2 (x; λ 2 )
旋转操作 先裁剪后旋转
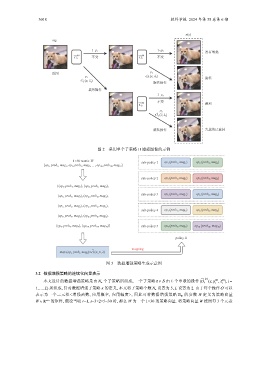
图 2 采用单个子策略 Π 增强图像的示例
1×30 matrix W
sub-policy 1 op 1 (prob 1 , mag 1 ) op 2 (prob 2 , mag 2 )
<op 1 , prob 1 , mag 1 , op 2 , prob 2 , mag 2 , ... , op 10 , prob 10 , mag 10 ]
sub-policy 2 op 3 (prob 3 , mag 3 ) op 4 (prob 4 , mag 4 )
[(op l , prob 1 , mag 1 ), (op 2 , prob 2 , mag 2 ), mapping
sub-policy 3 op 5 (prob 5 , mag 5 ) op 6 (prob 6 , mag 6 )
(op 3 , prob 3 , mag 3 ), (op 4 , prob 4 , mag 4 ),
(op 5 , prob 5 , mag 5 ), (op 6 , prob 6 , mag 6 ),
sub-policy 4 op 7 (prob 7 , mag 7 ) op 8 (prob 8 , mag 8 )
(op 7 , prob 7 , mag 7 ), (op 8 , prob 8 , mag 8 ),
(op 9 , prob 9 , mag 9 ), (op 10 , prob 10 , mag 10 )] sub-policy 5 op 9 (prob 9 , mag 9 ) op 10 (prob 10 , mag 10 )
policy Ⅱ
−
map (op i , prob i , mag i )= (x; p, λ)
图 3 数据增强策略生成示意图
3.2 数据增强策略的连续化向量表示
(π) (π) (π)
本文设计的数据增强策略是由 N π 个子策略所组成, 一个子策略 π ∈ S 由 L 个串联的操作 {O i (x; p ,λ ),i =
i i
1,...,L} 所组成, 针对数据增强子策略 π 的定义, 本文将子策略个数 N π 设置为 5, L 设置为 2. 由于每个操作 O 可以
表示为一个三元组<增强函数, 应用概率, 应用幅度>, 因此可将数据增强策略 Π W 的参数 W 定义为策略向量
W ∈ R r×s 的矩阵, 假设当取 r=1, s=3×2×5=30 时, 那么 W 为一个 1×30 的策略向量. 将策略向量 W 按照每 3 个元素