
Page 319 - 《软件学报》2023年第1期
P. 319
乔少杰 等: 情景感知驱动的移动对象多模式轨迹预测技术综述 315
p 3
p 4 B′
p 13
p 2
p 5
p 12 A C
p 11
p 10
p 1
p 6
p 9
B
p 8
p 7
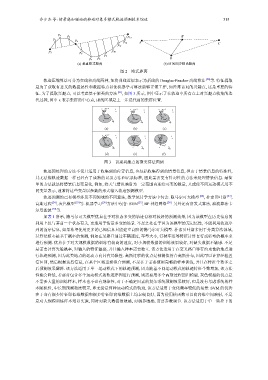
(a) 垂直欧式距离 (b) 时间同步欧氏距离
图 2 欧氏距离
轨迹压缩算法可分为在线和离线两种, 如将曲线近似表示为折线的 Douglas-Peucker 离线算法 [20] 等. 特征提取
是为了获取有意义的数据属性和数据特点以使机器学习算法能够正常工作, 如经常访问的兴趣点, 这是重要的特
征. 为了提取兴趣点, 可以考虑基于聚类的方法 [21] , 如图 3 所示, 图中显示了在轨迹中所有点上对兴趣点收集的迭
代过程, 图中 x 表示集群的中心点, 虚线区域是上一步迭代前的集群位置.
x x x
(a) (b) (c)
x x
x
(d) (e) (f)
图 3 识别兴趣点的聚类算法图例
轨迹预处理的方法不仅只适用于收集到的位置信息, 也包括收集得到的情景信息, 但由于情景信息的特殊性,
其无法像轨迹数据一样已经有了成熟的记录方法和记录标准, 因此需要更有针对性的方法来处理情景信息. 最简
单的方法就是将情景信息变量化, 例如, 将天气情况映射为一定范围内连续可变的数量, 又或使不同运动模式用不
同变量表示, 通常将这些变量以参数的形式输入轨迹预测模型.
轨迹预测的已有模型涉及不同领域的不同算法, 数学统计学方法中包含: 隐马尔可夫模型 [22] , 朴素贝叶斯 [23] ,
高斯过程 [24] , 灰色模型 [25] 等. 机器学习 [26] 方法中包含: SVM [27] , BP 神经网络 [28] . 另外还有启发式算法, 滤波算法卡
尔曼滤波 [29] 等.
如表 1 所示, 隐马尔可夫模型优点在于对状态多变的轨迹有相对较好的预测效果, 因为该模型在历史信息的
利用上仅与其前一个状态有关, 更适用于情景多变的场景. 不足之处在于因为该模型的无记忆性, 不能利用轨迹序
列的前序信息, 如果希望使用更多的已知信息只能建立高阶的隐马尔可夫模型. 朴素贝叶斯多用于分类算法领域,
其算法核心是基于概率的预测, 例如在某路口通过车辆速度, 车型大小, 行驶车道等特征计算直行或转弯的概率来
进行预测. 优点在于对大规模数据的训练有较高的速度, 对小规模数据的训练效果较好, 对缺失数据不敏感. 不足
是需要计算先验概率, 对输入的特征敏感, 并且输入样本需要独立. 该方法适用于在交叉路口等有约束性的地点进
行轨迹预测, 因为此类地点的运动方向具有局限性. 高斯过程的优点是预测值符合高斯分布, 因此可以计算经验置
信区间, 然后根据这些信息, 在某个区域重新拟合预测, 不足在于需要使用完整的样本训练, 并且在特征个数多之
后预测效果骤降. 该方法适用于单一运动模式下的轨迹预测, 因为随着不同运动模式的轨迹特征个数增加, 该方法
性能会降低, 若要对包含多个运动模式的轨迹序列进行预测, 则需要用多个高斯过程回归模型. 灰色模型的优点是
不需要大量的训练样本, 样本也不必有规律性, 对于不确定因素的复杂系统预测效果较好, 但是没有考虑系统的样
本随机性, 中长期预测精度较差, 即无论是何种运动模式的轨迹, 该方法适用于变化频率较低的场景. SVM 的优势
在于当有很少特征即低维数据和很多特征即高维数据上均表现良好, 因为使用核函数可以向高维空间映射, 不足
是对大规模训练样本难以实施, 同时对缺失数据很敏感, 对调参敏感, 需要参数调节. 该方法适用于单一监控下的