
Page 324 - 《软件学报》2023年第1期
P. 324
320 软件学报 2023 年第 34 卷第 1 期
棒性和可伸缩性.
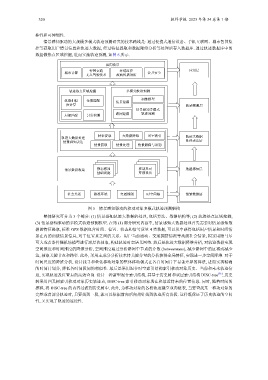
情景感知驱动的大规模多模式轨迹预测研究的技术路线是: 通过便携式通信设备、手机互联网、城市智慧监
控等获取用户情景信息和轨迹大数据, 经过特征提取和数据降维分析等处理后存入数据库. 通过轨迹数据库中的
数据做热点区域挖掘, 进而实施轨迹预测, 如图 6 所示.
应用场景
智慧交通 环境监控 应用层
城市计算 公共安全
无人驾驶技术 疾病传播预防
轨迹热点区域挖掘 多模式轨迹预测
轨迹相似 全局匹配 情景建模 训练模型
度计算 轨迹预测层
情景感知多模式
路网建模 轨迹预测
局部匹配 异常检测
特征提取 大数据降维 时空索引 轨迹大数据
轨迹大数据处理
情景感知表达 处理表达层
情景获取 情景处理 情景解释与识别
情景数据收集 静态感知 移动及可 数据感知层
基础设施 穿戴设备
社会关系 路况环境 交通规则 时空间隔 情景数据层
图 5 情景感知驱动的移动对象多模式轨迹预测架构
整体研究可分为 3 个部分: (1) 情景感知轨迹大数据的处理, 包括算法、数据结构等; (2) 轨迹热点区域挖掘;
(3) 情景感知驱动的多模式轨迹预测模型. 在第 (1) 部分研究内容中, 情景感知大数据处理首先需要对情景感知数
据的特征提取, 标准 GPS 数据包含时间、位置、状态和信号质量 4 类数据, 可以从中获得包括用户情景和时间情
景在内的初级情景信息, 对于位置点之间的关系、用户当前活动、交通拥挤情况等高级社会情景, 拟采用隐马尔
可夫或者条件随机场模型进行深层次抽取, 构建轨迹时空语义网络. 然后是轨迹大数据降维分析, 对轨迹数据实现
空间维度和时间维度的降维分析, 空间维度通过分析路网中节点的介数 (betweenness), 减少路网中的区域或减少
边, 抽取关键节点和路径. 此外, 采用主成分分析技术将关键分量的分析获得全局特征, 实现进一步空间降维. 对于
时间尺度的降维分析, 设计找寻和量化移动对象的整体移动模式在各自时间片下显著差异的算法, 进而实现精确
的时间片划分, 降低各时间段间的相似性. 最后是采用混合时空索引结构索引移动对象历史、当前和未来轨迹信
息, 实现轨迹及位置点的高效查询. 设计一种新型混合索引结构, 其基于历史树和双层索引结构 DISC-tree [56] , 历史
树采用四叉树索引移动对象历史轨迹点, DISC-tree 索引移动对象现在和最近将来的位置信息. 同时, 随着时间的
推移, 将 DISC-tree 的内容过渡到历史树中. 此外, 为移动对象的各段轨迹建立双向链表, 当要查找某一移动对象的
完整或者部分轨迹时, 只要找到一段, 就可以依据前向后向指针找到轨迹所有各段. 这样既保证了历史轨迹的空间
性, 又实现了轨迹的连续性.