
Page 318 - 《软件学报》2023年第1期
P. 318
314 软件学报 2023 年第 34 卷第 1 期
轨迹模式挖掘等 [5] . 此外, 情景感知应用产生和积累了海量、动态、异构、无规律、分布在系统各处的情景信息.
而轨迹数据研究的最终目的是回答: “在何时 (When)、何地 (Where)、时空对象 (Who 或 What) 发生了什么样的变
化 (What) 以及如何变化的 (How)”, 这与情景感知研究中的 4W (Who、When、Where 和 What) 非常契合, 而移动
对象所处的运动环境是动态变化的, 不能单纯依赖静态交通网络环境预测其运动行为, 需要综合考虑用户的行为
习惯、所处的位置、社会关系等用户场景; 交通状况、天气情况等物理场景; 出行高峰、季节等时间场景对移动
对象运动行为的影响. 本文将综述轨迹预测的基本定义, 轨迹数据的来源和表现形式, 经典的算法、模型和关键技
术, 以及不同的应用场景. 其次, 介绍情景感知的基本概念与定义, 其所包含的关键技术以及实现方法, 情景感知技
术与实际应用的结合, 以及情景感知应用于轨迹预测的方法, 最后总结当前研究的进度和存在的问题, 展望未来的
研究方向.
现实生活场景中有许多不同类型的轨迹数据, Zheng 等人 [6] 根据轨迹来源将轨迹数据分为主动或被动记录.
例如: 在社交媒体签到打卡时主动记录了自己的位置, 或者拍摄了基于位置的图片, 图片与位置标签相关联. 被动
记录则是轨迹大数据的重要来源, 如今移动便携式信息采集器已经普及, 这些装置会自动记录大量轨迹点. 交易记
录等也可看作轨迹数据, 因为其记录了时间和地点. 而情景信息一般通过两种方法获取: (1) 感知环境:环境信息和
用户物理信息可以通过物理或软件传感器获得. 用户的交互习惯和交互历史记录主要是通过主机的逻辑传感器获
得的. (2) 明确提供的情景:例如, 当用户的偏好被明确传达给发出请求的应用程序时, 可以获得这些偏好. 轨迹数
据通常被表述为移动对象坐标随时间的变化情况, 如 GPS 中返回的数据是某一时刻的经纬度, 则可以用类似
p=(x, y, t) 的形式表示, x 和 y 分别代表移动对象的经纬度, t 代表时间. 每隔一个单位时间返回一次, 一段时间后反
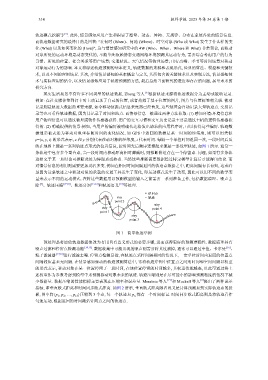
映在地图上便是一系列轨迹点形式的位置信息, 按时间先后顺序连接起来便是一条线型轨迹, 如图 1 所示. 通常一
条轨迹中包含多个重合点, 当一段时间内移动距离相对骤减时, 则推断附近存在一个停留点. 同理, 如果有多条轨
迹相交于某一点时也可推断此处为停留点或热点. 当然这些推断需要数据经过特定模型计算后才能得出结论. 而
对情景信息的利用则需要更加灵活多变, 例如在相同时间间隔返回的轨迹点数据之中, 距离间隔有长有短, 这或许
是因为这条轨迹之中移动对象的承载的交通工具发生了变化, 即运动模式发生了改变, 因此可以用不同的数学变
量来表示不同的运动模式. 在将这些数据用以预测模型的输入之前需要一系列准备工作, 包括数据清理、噪声去
除 [7] 、轨迹压缩 [8−10] 、轨迹分割 [11,12] 和轨迹语义 [13] 等处理.
返回点
stay 轨迹
point 2
stay
stay point 4
point 1
stay
point 3
图 1 简单轨迹举例
预处理是将原始轨迹数据修改为有用且有意义形式的必要步骤, 进而获得更好的预测准确性. 数据清理具有
噪声过滤和停留点检测功能 [14,15] . 数据收集中可能出现的噪声则需要将其过滤掉, 通常可以通过中值、卡尔曼 [16] 、
粒子滤波器 [17,18] 进行滤波去噪. 停留点检测是指, 在轨迹点采样间隔相同的情况下, 一定单位时间内返回的位置点
间隔较短甚至无间隔. 在情景感知驱动的轨迹预测算法中, 常将轨迹序列中位置点之间的时间和空间间隔以权重
的形式表示, 移动对象在某一位置停留了一段时间, 在该位置停留的时间越多, 其权重值就越高, 以此可通过将上
述权重作为参数考虑到模型中来预测移动对象未来的轨迹. 轨迹压缩则是在尽可能小的影响预测精度的情况下减
少数据量. 数据压缩的性能指标主要表现在压缩率和误差量. Meratnia 等人 [19] 和 Muckell 等人 [8] 提出了两种误差
指标, 即垂直欧式距离和时间同步欧式距离. 如图 2 所示, 垂直欧式距离顾名思义是计算预测点到实际轨迹点的投
影, 图中将{p 1 , p 2 , …, p 13 }压缩到 3 个点, 每一个轨迹点 p n 都有一个时间标记. 时间同步欧式距离则是将轨迹看作
匀速运动, 根据返回的时间戳估计两点之间的轨迹点.