
Page 135 - 《软件学报》2021年第10期
P. 135
席亮 等:邻域形态空间多源免疫检测器生成与检测 3107
用混沌算子提高了樽海鞘群算法(salp swarm algorithm,简称 SSA)的收敛速度.
不同映射的混沌序列发生器产生不同的混沌序列,其概率分布是不同的,会影响到算法的效率.当前,
Logistic 映射和自映射是两种主要的方式.Logistic 映射进行有限次折叠,得到的空间结构相对简单,存在着较多
[9]
的安全问题;自映射产生的混沌序列具有更好的随机性和初值敏感性,算法收敛速度快,空间分布更好 .
Lyapunov 指数常用于衡量系统的混沌性质 [25] ,而且由于基于自映射的 Lyapunov 指数高于基于 Logistic 的
Lyapunov 指数,因此自映射比 Logistic 映射具有更好的问题空间覆盖性能,本文将采用该方法产生混沌序列.而
且,文献[26]将混沌映射应用于实值形态空间下的否定选择算法,并且证明了自映射在 n 维空间具有良好的遍历
性和收敛性,从而能够提高检测器的分布能力.
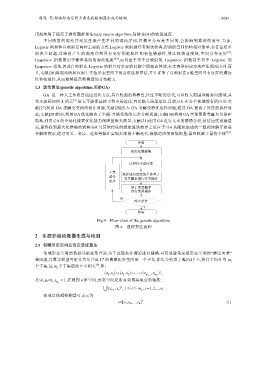
1.3 遗传算法(genetic algorithm,简称GA)
GA 是一种人工免疫自适应进化方法,具有较强的鲁棒性,经过不断的迭代,可以较大范围地覆盖问题域,其
[9]
基本流程如图 4 所示 .但它不能保证搜寻到全局最优,容易陷入局部最优.目前,GA 在各个领域都有所应用:文
献[27]利用 GA 求解公交网络设计问题;文献[28]引入 GA 来解决特征选择问题,通过 GA 提高了算法的执行效
率;文献[29]指出,利用 GA 优化解决了串联-并联系统的冗余分配问题;文献[30]利用 GA 实现图聚类匿名以保护
隐私,利用 GA 的全局化搜索优化能力保障图聚类质量;文献[31]使用 GA 进行文本的感情分析,使适应度逐渐提
高,最终找到最大化准确的词典.GA 与其他传统的搜索算法相异之处在于:GA 从随机生成的一组初始解开始进
行解的搜索,通过交叉、变异、选择等操作实现后续的不断迭代,根据适应度函数衡量,最终收敛于最优个体 [32] .
开始
初始化数据集
计算样本适应度
子集 选择适应度高的个体基于
遗传 交叉概率进行交叉操作
变异
基于变异概率
进行变异操作
N
终止条件
Y
结束
Fig.4 Flow chart of the genetic algorithm
图 4 遗传算法流程
2 多源邻域检测器生成与检测
2.1 邻域形态空间及否定选择算法
邻域形态空间的数据基础是集合论,基于离散拓扑理论进行建模,可有效避免实值形态空间的“维度灾难”
n j
等问题,其数学模型可定义为集合[0,1] 的离散拓扑空间的一个子集,在集合的第 j 维[0,1] 上,将其平均分为 m j
[9]
个子集,这 m j 个子集彼此互不相交 ,即:
(, )xx ( , )x x ... (x , x ) ,
j
0 1 1 2 m j 1 m j
其中,x 0 =0, x 1. 扩展到 n 维空间,形态空间是所有邻域块集合的集族:
m j
(x i 1 , ) , 1x i n ≤≤ m j , j 1,2,..., .n
i
邻域自体或检测器可表示为
s=[s 1 ,s 2 ,…,s n ] T (1)