
Page 96 - 《摩擦学学报》2020年第4期
P. 96
506 摩 擦 学 学 报 第 40 卷
1.3 SiCH润滑性能测试 转. 因轨道是螺旋形的,需通过接触引导板使球每公
SiCH润滑油的润滑性能测试分别在真空四球试 转一圈返回其原始轨道半径. 当球接触导向板时,通
验机、真空SRV摩擦试验机和SOT上进行. 过安装在导板上的压电式力传感器测出摩擦力. 如将
(1) 真空四球试验机主要是测定高真空、纯滑动条 螺旋摩擦试验模块更换为四球试验模块即可进行真
件下润滑油的减摩抗磨性能,其中润滑油用量约为4 mL. 空四球试验. 试验条件列于表2中.
(2)真空SRV摩擦试验机用于测定球-盘接触往复
Rotating Plate
Rotation
振动摩擦,往复频率为50 Hz,行程1 mm. (tilted up for clarity)
Spiral
(3)真空SOT试验用于测试润滑油在接近轴承真 Ball orbit orbit
Guide plate
实工况下的边界润滑性能. 因本试验中润滑油含量有
Force transducer
限,摩擦副之间的润滑状态不处于弹性流体润滑区
间,而是处于边界润滑状态. 其润滑仅通过接触中的
单层润滑剂分子相互滑动,对分子滑动抵抗力是摩擦
力的来源. Scrub
Ball
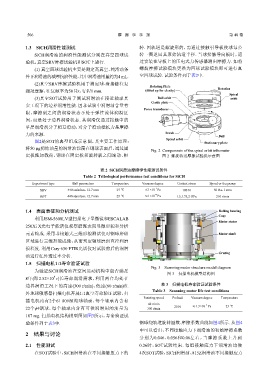
图2是SOT的典型组成示意图,其主要工作原理: Spiral orbit Stationary plate
将50 μg初始油量的润滑油涂覆在钢球表面后,通过固
Fig. 2 Components of the spiral orbit tribometer
定板施加载荷,钢球在固定板和旋转板之间滚动、枢 图 2 螺旋轨道摩擦试验机示意图
表 2 SiCH润滑油摩擦学性能测试条件
Table 2 Tribological performance test conditions for SiCH
Experiment type Ball parameters Temperature Vacuum degree Contact stress Speed or frequency
-1
SRV 440 stainless,12.7 mm 25 ℃ ≤1×10 Pa 100 N 50 Hz,1 mm
-4
SOT 440 stainless,12.7 mm 25 ℃ ≤1×10 Pa 1.5,1.75,2 GPa 210 r/min
1.4 表面表征和分析测试 Rolling bearing
Cage
利用JSM-5600LV型扫描电子显微镜和ESCALAB
Motor stator
250Xi X光电子能谱仪观察磨斑表面显微形貌和分析
元素构成. 采用非接触式三维形貌测试仪对钢球磨斑 Motor shaft
区域进行三维形貌成像,从而判定钢球磨斑直径和磨
损程度. 利用Cary 630 FTIR光谱仪对试验前后的润滑
Grating
油进行红外透过率分析.
1.5 扫描电机1:1寿命验证试验
Fig. 3 Scanning motor structure model diagram
为验证SiCH润滑油在空间运动机构中能否满足
图 3 扫描电机模型结构图
8年(即2.52×10 r)长寿命润滑需求,利用两台均处于
8
边界润滑工况下的高速(300 r/min)、低速(60 r/min)红 表 3 扫描电机寿命验证试验条件
Table 3 Scanning motor life test conditions
外地球敏感器扫描电机开展1:1真空寿命验证试验,扫
Rotating speed Preload Vacuum degree Temperature
描电机内有2个61 809深沟球轴承,每个轴承内含有
60 r/min ≤1.3×10 Pa
−5
22个ϕ4钢球,每个轴承内含有可供润滑用的油量为 300 r/min 20 N 25 ℃
107 mg. 扫描电机结构模型图如图3所示,寿命验证试
验条件列于表3中. 钢球绕轨道旋转圈数-摩擦系数曲线如图4所示. 从图4
中可以看出,不同接触应力下润滑油的初始摩擦系数
2 结果与讨论
分别为0.046、0.056和0.06左右,当摩擦系数上升到
2.1 性能测试 0.26时,SOT试验结束. 每组接触应力下润滑油均做
在SOT试验中,SiCH润滑油在不同接触压力下的 4次SOT试验,SiCH润滑油、815Z润滑油不同接触应力