
Page 76 - 《高原气象》2026年第2期
P. 76
高 原 气 象 45 卷
376
(Sentinel-3A/3B)对青海湖的水位变化的监测成果。
研究显示, 不同高度计的数据在青海湖的监测结果
较为一致, 融合后的水位数据均方根误差(Root
Mean Square Error, RMSE)为 0. 204 m, 与地面观测
数据的相关系数为 0. 941 (Ma et al, 2024)。时间跨
度为1959年1月至2017年12月。
大气数据来源于高分辨率欧洲中期天气预报
中心第五代再分析数据集(ECMWF Reanalysis 5th
Generation, ERA5)。该数据集涵盖了从 1000 hPa
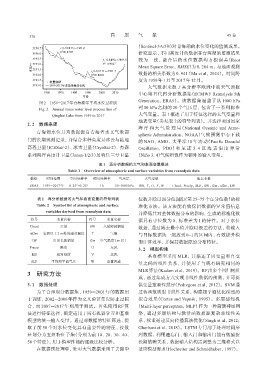
图2 1959 -2017年青海湖年平均水位过程线
Fig. 2 Annual mean water level process line of 到 50 hPa 之间的 20 个气压层, 包含了一系列标准
Qinghai Lake from 1959 to 2017 大气变量。表 1概述了用于特征选择的大气变量和
地表变量(参见表 2的符号列表)。并选择美国国家
2. 2 数据来源
海 洋 和 大 气 管 理 局(National Oceanic and Atmo‐
青海湖水位月均数据源自青海省水文气象部
spheric Administration, NOAA)气候预测中心下载
门的长期观测记录, 并结合多种高度计冰云与陆地 的 NAO、 AMO、 太平洋 10 年涛动(Pacific Decadal
高程卫星(ICESat/-2)、 冰雪卫星(CryoSat-2)、 杰森 Oscillation, PDO)和 尼 诺 3. 4 区 海 表 温 度 异 常
系列海洋高度计卫星(Jason-1/2/3)及哨兵三号卫星 (Niño 3. 4)气候指数作为额外的输入变量。
表1 再分析数据的大气和表面变量概述
Table 1 Overview of atmospheric and surface variables from reanalysis data
数据 时间范围 空间分辨率 时间分辨率 气压层 大气变量 地表变量
ERA5 1959 -2017年 0. 25°×0. 25° 1 h 50~1000 hPa RH, T, U, V, W Cloud, Precip, SLP, SW, t2m, td2m, LW
表2 再分析数据的大气和表面变量的符号列表 位数并除以四分位间距(第 25~75个百分位数)的标
Table 2 Symbol list of atmospheric and surface 准化方法。该方法能有效保留数据的异常值信息
variables derived from reanalysis data
并降低其对整体数据分布的影响, 生成的标准化数
符号 变量名称 符号 变量名称 据具有中位数为 0、 标准差为 1 的特性。对于水位
Cloud 云量 SW 入射短波辐射 数据, 通过减去最小值并除以极差的方法, 将输入
td2m 表面以上2 m处的露点温度 T 气温 与目标数据统一缩放到 0~1 的区间内, 有效提升模
LW 出射长波辐射 t2m 空气温度2 m以上 型计算效率, 并保持数据原始分布特征。
Precip 降水 U 东风 3. 2 模型构建
RH 相对湿度 V 北风
基准模型采用 MLR, 其描述了因变量和自变
SLP 平均海平面气压 W 垂直风速
量之间的线性关系, 并使用了与现有研究相同的
MLR算法(Kadam et al, 2019)。RF由多个回归树组
3 研究方法
成, 通过集成方式实现非线性数据的预测, 并可提
3. 1 数据处理 供变量重要性排序(Pedregosa et al, 2012)。SVM通
为了合理划分数据集, 1959 -2001 年的数据用 过核函数映射非线性关系, 构建超平面优化模型的
于训练, 2002 -2006 年作为交叉验证集以防止过拟 拟合效果(Cortes and Vapnik, 1995)。多层感知机
合, 而 2007 -2017 年则用于测试。首先使用 RF 算 (Multi-layer perceptron, MLP) 作为一种前馈神经网
法进行特征选择, 确定适用于所有机器学习和基准 络, 通过多层结构与激活函数捕捉复杂非线性关
模型的统一输入变量。通过对数据的特征筛选, 提 系, 权重通过反向传播算法优化(Singh et al, 2012;
取了前 50 个对水位变化具有重要性的特征, 按数 Ghorbani et al, 2018)。LSTM 专门用于处理时间序
量划分为五组特征子集(分别为前 10、 20、 30、 40、 列数据, 利用遗忘门、 输入门和输出门能有效捕捉
50个特征), 用于模型性能的逐级比较分析。 长期依赖关系, 数据输入结构需调整为三维格式以
在数据预处理中, 针对大气数据采用了去除中 适应模型需求(Hochreiter and Schmidhuber, 1997)。