
Page 90 - 《爆炸与冲击》2026年第5期
P. 90
第 46 卷 冯 彬,等: 基于图神经网络的可燃气体泄漏扩散预测方法 第 5 期
多次的调整,从而大幅增加了试错成本。损失函数为:
(3)
L = AL C + BL Q 8
分别为浓度和 8 和 分别为对应的权重因子。
式中: L 为总损失, L C 和 L Q 8 Q 的预测损失,A B
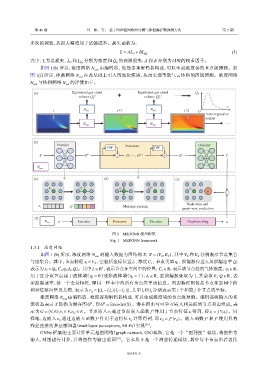
如图 1(b) 所示,浓度网络 N co n 由编码器、处理器和解码器构成,可以生成浓度场的节点级预测。如
图 1(f) 所示,体积网络 N vo l 在此基础上引入图池化模块,从而实现等效气云体积的图级预测。浓度网络
N co n 与体积网络 N vo l 的详情如下。
(a) Equivalent gas cloud Equivalent gas cloud Q 8
t+1 t+2 ……
volume Q 8 volume Q 8
t
t N vol t+1 N vol t+2 O
Auto-regressive
rollout
……
N con N con
(b)
Encoder Processor Decoder
GN 1 GN L
1 …
X G 0 + G , , G L−1 + G L Y
N con
(c) (d) (e)
0 l l+1
x i v i v i v i v i
u +
Node-wise and
0 Message-passing
x i
v i graph-wise prediction
(f)
N vol Z Encoder Processor Decoder Graph pooling u
图 1 MSDGNN 模型框架
Fig. 1 MSDGNN framework
1.3.1 浓度网络
如图 1 (b) 所示,浓度网络 N co n 的输入数据为图结构 X, X = (V X ,E X ) ,其中 V X 和 E X 分别表示节点集合
δ i 及泄漏速率 Q,
与边集合。其中,节点特征 x i ∈ V X ,它包括坐标位置 l i 、浓度 C i 、节点类型 η i 、泄漏源位置
l i ∈ R 3 η i ∈ R ,
表示为 x i = [l i ,C i ,η i ,δ i ,Q] 。其中 ,表示节点在空间中的位置; C i ∈ R ,表示该节点处的气体浓度;
δ i ∈ R ,在泄漏源处取为 1,其余取 Q ∈ R ,表
用于区分该节点属于流体域( η i = 0 )或非流体域( η i = 1 ); 0;
示泄漏速率,是一个全局特征,即同一样本中的所有节点共享该信息。图边特征则包括节点在空间中的
l j 分别表示第 i 个和第 j 个节点的坐标。
相对位移向量及其模,表示为 r i j = [(l i −l j ),∥ l i −l j ∥] ,其中 l i 和
浓度网络 N co n 由编码器、处理器和解码器构成,可以生成浓度场的节点级预测。编码器将输入的系
统状态表示 X 转换为潜在图 G 0 ,即 G = Encoder(X) 。潜在图由与可学习嵌入相关联的节点和边组成,表
0
v
f v v i = f (x i ) 。同
示为 G = (V,E),v i ∈ V,e ij ∈ E 。节点嵌入 v i 通过节点嵌入函数 作用于节点特征 x i 得到,即
f e e f v f e 使用具有
样地,边嵌入 e i j 通过边嵌入函数 作用于边特征 r ij 计算得到,即 e ij = f (r ij ) 。嵌入函数 和
残差连接的多层感知器(multilayer perceptrons, MLPs)实现 [36] 。
GNNs 框架的主要计算单元是图网络(graph network, GN)模块,它是一个“图到图”模块,将图作为
输入,对图进行计算,并将图作为输出返回 [25] 。它本质上是一个消息传递模块,其中每个节点沿着边传
051431-5