
Page 35 - 《爆炸与冲击》2026年第01期
P. 35
第 46 卷 李 腾,等: 多航行体水下发射弹道干扰特性影响数值研究 第 1 期
将式 (7)~(8) 代入式 (4)~(6) 即得到修正后的可实现的 k-ε 湍流模型。
1.2.2 多相流模型
多相流指存在明显相间交界面的流体系统,通常由两种或两种以上的连续介质流体相组成,航行体
的水下发射过程涉及水蒸气、水、空气的三相混合流动作用。关于多相流的常见模拟方法包括混合多相
流(mixture multiphase,MMP)、流体域体积多相流(VOF)及欧拉多相流模型(Eulerian multiphase,EMP)。
其中,流体域体积 VOF 多相流模型可对不混溶两相界面的分布和移动进行预测和追踪,不同相之间共用
一套控制方程,对各相流体介质赋予一个所占相体积分数的变量,求解此变量以获取相间的交界面,该
模型可用于研究物体在液体中的运动、溃坝后流体流动、射流破裂的预测以及气-液自由交界面的流动
追踪等流场变化。本研究中,对空泡表面气液两相界面的形态变化捕捉要求严格,结合水下发射问题的
仿真经验,采用 VOF 多相流模型展开计算。
在 VOF 多相流模型中,各相的分布及空间位置可由输运方程求解得到:
∂α i
+∇·(α i u) = 0 (9)
∂t
0≤α i ≤1 )。
式中: α i 为相体积分数(
1.2.3 空化模型
水下发射工况中,航行体模型的肩部压力低于水的饱和蒸气压时,模型会发生空化现象产生空泡。
空泡经历初生、发展、脱落及出水溃灭的过程,影响弹体运动及流场变化。针对自然空化现象,本文的
流体计算软件提供了 2 种空化模型,即 Schnerr-Sauer 空化模型和完整 Rayleigh-Plesset 空化模型。其中,
Schnerr-Sauer 空化模型不考虑空化气泡的增长速度、空泡表面张力及液相水的黏性效应,是一个简化后
的质量输运空化模型。其质量源项建立了在单个球形空泡膨胀和收缩过程中水相和水蒸气相之间的质
量变化速率与压力之间的关系,可表示为:
3 2 (p 1 − p sat )
ρ v ρ l
+
˙m = α v (1−α v ) p 1 ≤p sat
R 3
ρ m ρ l
(10)
3 2 (p sat − p 1 )
− ρ v ρ l
˙m = − α v (1−α v ) p 1 >p sat
ρ m R 3 ρ l
˙ m 为质量变化速率,上标+和−分别表示液相水蒸发和水蒸气凝结;R p sat 为水的饱和蒸
式中: 为空泡半径;
p 1 为空泡远场处的流体动力压力,p ≤p 时发生空化形成空泡。根据计算效率和经验,本文对自
t
气压;
1 sa
然空化现象的模拟采用 Schnerr-Sauer 空化模型。
Background mesh
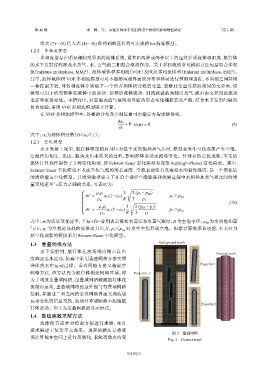
1.3 重叠网格方法
水下发射时,航行体在流场域内做六自由 Overset mesh
度减速出水运动,仿真中采用重叠网格方法实现
弹体的水中运动过程。重叠网格方法又称嵌套 Projectile 1
网格方法,该方法先为航行体创建网格区域,称 Projectile 3
为子域或重叠域网格,重叠域网格跟随航行体在
流场内运动,重叠域网格的最外围与背景域网格
接触,并通过二者之间的重叠网格界面实现流场
运动变化的信息交换,流场计算域网格不跟随航
Projectile 2
行体运动。图 2 为重叠网格的显示形式。
1.4 数值离散求解方法
流体仿真需要对控制方程进行求解,而直
接求解过于复杂不太现实。现实的做法是将流
图 2 重叠网格
场计算域在空间上进行离散化,求解离散点的变
Fig. 2 Overset mesh
011102-5