
Page 29 - 《中国电力》2026年第5期
P. 29
徐恒山等:考虑储氢状态和直流母线电压稳定性的电氢耦合储能直流微网协调控制策略 2026 年第 5 期
−i b 则可得到 k ,并依据式(10)计算 ;当 u <
u dc 0 P el.ref dc
−
u −Δu 时,系统功率缺额,PEMFC
k d h 处于放电
u N dc.ref t
1 − d bat
u dc 内环 状态,图 5 中控制切换至 2,将 SOH 和|Δu |输入
1/s PI dc
1 − C vir u dc.ref i b.ref 控制 到 PEMFC-FLC 模块得到 k 后,再次通过式(10)计
1
Ts+1 算 P fc.ref 。当 u dc.ref −Δu <u <u dc.ref +Δu 时,系统
h
t
th
dc
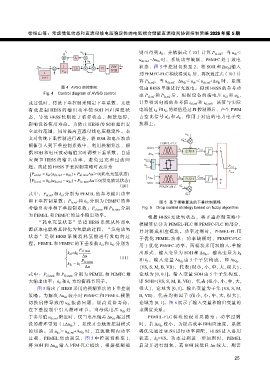
图 4 AVSG 的控制框 仅由 BESS 单独进行充放电。得到 HESS 的参考功
Fig. 4 Control diagram of AVSG control
率 P el.re f 和 P fc.re f 后 , 根 据 设 备 的 端 电 压 u 和 l u ,
fc
e
或过低时,传统下垂控制采用定下垂系数,无法 计算得到电流的参考值 i el.re f 和 i fc.ref ,该值与实际
有 效 控 制 HESS 的 输 出 功 率 使 SOH 回 归 理 想 状 电流值 i 和 l i 的差值经过 PI 控制器后,产生 PWM
c
e
f
态 , 导 致 HESS 长 期 处 于 临 界 状 态 、 频 繁 启 停 , 占空比信号 d 和 l d ,作用于对应的电力电子变
e
fc
影响设备使用寿命。为防止 HESS 的 SOH 超出安 换器上。
全运行范围,同时提高直流母线电压稳定性。本
文对传统下垂控制进行改进,将 SOH 和电压波动 * u dc −
u dc
PEMEL-FLC
幅值引入到下垂控制系数中,利用模糊算法,根
SOH 1
k 0 P el.ref
据 SOH 和电压波动幅值实时调整下垂系数,自适 公式10
Δu dc
应 调 节 HESS 的 输 出 功 率 , 避 免 过 充 和 过 放 问 u dc.ref
题。改进的 HESS 下垂控制策略可表示为 u dc − P el.ref
P fc.ref
P el.ref = k el (u dc.ref −u dc )+ P el.min ∆u>0(耗电充氢状态)
k 1 P fc.ref
Δu dc
公式10
P fc.ref = k fc (u dc.ref −u dc )+ P fc.min ∆u≤0(发电放氢状态)
SOH 2
(10) PEMFC-FLC u dc * +
l
式中:P f 和 k 分别为 PEMEL 的参考输出功率 u dc
el.re e
−
c
和下垂控制系数;P fc.re f 和 k 分别为 PEMFC 的参 图 5 基于模糊算法的下垂控制策略
f
考输出功率和下垂控制系数;P el.mi n 和 P fc.mi n 分别 Fig. 5 Drop control strategy based on fuzzy algorithm
为 PEMEL 和 PEMFC 的最小输出功率。 根据 HESS 充放氢状态,将下垂控制策略中
“耗电充氢状态”是指 HESS 系统从外部电 模糊算法分为 PEMEL-FLC 和 PEMFC-FLC 两部分,
源获取电能将其转化为氢能的过程,“发电放氢
并封装成相应模块。功率过剩时,PEMEL-FL 用
状 态 ” 是 指 HESS 系 统 消 耗 氢 能 进 行 发 电 的 过 于 优 化 PEMEL 功 率 ; 功 率 缺 额 时 , PEMFC-FLC
程。PEMEL 和 PEMFC 的下垂系数 k 和 l k 分别为 用于优化 PEMFC 功率。两模块采用双输入-单输
c
f
e
P el.max
出形式,输入变量为 和 Δu ,输出变量为
k el =k 0 SOH k
dc 0
∆u
(11)
和 k 。 输 入 变 量 Δu 由 c 个 子 集 构 成 , 即
5 Δu =
P fc.max 1 d dc
k fc = k 1
∆u {VS, S, M, B, VB},代表{很小, 小, 中, 大, 很大},
式中:P el.ma x 和 P fc.ma x 分别为 PEMEL 和 PEMFC 最 论域为 [0, 0.1]。输入变量 SOH 由 5 个子集构成,
大输出功率;k 和 0 k 为均衡调节因子。 即 SOH={VS, S, M, B, VB},代表{很小, 小, 中, 大,
1
图 5 给出了 HESS 采用的模糊算法的下垂控制 很大},论域为 [0, 1]。输出变量为子集{VS, S, M,
策略。为解决 Δu 较小时 PEMFC 和 PEMEL 频繁 B, VB}, 代 表 均 衡 因 子 {很 小 , 小 , 中 , 大 , 很 大 },
c
d
切 换 启 停 导 致 的 u 振 荡 问 题 , 提 高 设 备 寿 命 , 论域为 [0, 1]。图 6 展示了输入变量和输出变量的
c
d
在下垂控制中引入滞环环节。当母线电压 u 处 隶属度关系。
c
d
于参考值 u dc.re f 附近时,仅当电压偏差 Δu 超过预 PEMEL-FLC 模 块 的 设 计 思 路 为 : 功 率 过 剩
c
d
设的滞环带宽(±Δu ),系统才会触发控制模式 时,若 Δu 较小,为提高效率和响应速度,系统
c
d
th
的切换。当 u >u dc.ref +Δu 时,直流微网内功率 将优先通过 BESS 进行功率调配,HESS 进入备用
h
t
dc
过 剩 , PEMEL 启 动 制 氢 , 图 5 中 控 制 切 换 至 1, 状态,k =VS。功率过剩进一步加剧时,PEMEL
0
将 SOH 和 Δu 输 入 PEM-FLC 模 块 , 根 据 模 糊 规 启动并进行制氢,若 SOH 较低且 Δu 较大,则需
c
d
25