
Page 28 - 《中国电力》2026年第5期
P. 28
2026 年 第 59 卷
−
风力发电单元 u dc
AC DC 直流
负荷
DC DC
PMSG d SPWM
SOC SOH i el HESS单元
ω rm i sdq −
− − 电
ω rm.ref u el 解 H 2 流
MPPT PI PI
d SPWM d el 槽
u dc.ref PI PI
CV i fc
燃
−
−
u dc i sdq
料
d fc u fc
BESS单元 i bat i b C dc 电
− 池
锂
电 d S1
池 d S2
u dc
u el /u fc
−
u dc i el /i fc
u dc
模糊 −
AVSG SOH 下垂 PI
u dc G ÷
控制 控制 Ts+1 × d el
i b
d S1 u dc.ref
PWM d fc
u dc.max /u dc.min PI
PI
±P b.max
d S2 − CV
CP NOT u dc
u dc −
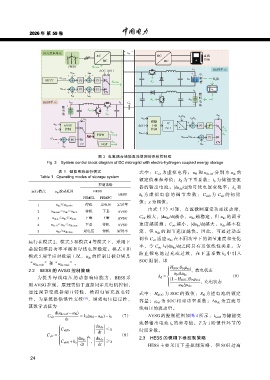
图 3 电氢耦合储能直流微网的系统控制框
Fig. 3 System control block diagram of DC microgrid with electro-hydrogen coupled energy storage
表 1 储能系统运行模式 式 中 : C vi r 为 虚 拟 电 容 ; u 和 u dc.re f 分 别 为 u 的
c
N
d
Table 1 Operating modes of storage system
额定值和参考值;k 为下垂系数;i 为储能变流
b
d
控制策略
器的输出电流;|du /dt|为母线电压变化率;k 和
a
dc
运行模式 u dc 波动范围 HESS
BESS k 为 虚 拟 电 容 的 调 节 参 数 ; C vir 0 为 C vi r 的 初 始
b
PEMEL PEMFC
值;x 为阈值。
1 u dc ≤u dc.min 停机 定电压 定功率
由式(7)可知,直流微网遭受功率扰动时,
2 u dc.min <u dc <u dc.L 待机 下垂 AVSG
c
c
3 u dc.L ≤u dc ≤u dc.H 下垂 下垂 AVSG C vi r 越大,|du /dt|越小,u 越稳定,但 u 的调节
d
dc
d
c
4 u dc.H <u dc <u dc.max 下垂 待机 AVSG 速度越缓慢;C vi r 越小,|du /dt|越大,u 越不稳
d
dc
c
5 u dc ≥u dc.max 定电压 停机 定功率 定,但 u 的调节速度越快。因此,可通过动态
d
调节 C r 适应 u 在不同功率下的调节速度和变化
c
运行在模式 2、模式 3 和模式 4 等模式下,采用下 vi d
率,令 C r 与|du /dt|之间具有近似线性关系。为
垂控制维持功率平衡和母线电压稳定。模式 1 和 vi dc
防 止 锂 电 池 过 充 或 过 放 , 在 下 垂 系 数 k 中 引 入
d
模式 5 用于应对极端工况,u 的控制目标分别是
c
d
SOC 限制,即
“u dc.min ”和“u dc.max ”。
2.2 BESS 的 AVSG 控制策略 H SOC S N µ ref , 放电状态
u N ∆u dc
(9)
为 提 升 母 线 电 压 的 动 态 响 应 能 力 , BESS 采 k d =
(1− H SOC )S N µ ref
, 充电状态
用 AVSG 控制,原理类似于虚拟同步发电机控制, u N ∆u dc
通 过 调 节 变 流 器 端 口 特 性 , 模 拟 电 容 充 放 电 特
N
式中:H SO C 为 SOC 的数值;S 为锂电池的额定
性,为系统提供惯性支撑 [35] ,增强电压稳定性, 容量;μ re f 为 SOC 相对功率系数;Δu 为直流母
c
d
其数学表征为 线电压的波动量。
d(u dc.ref −u N )
C vir = k d (u N −u dc )−i b (7) AVSG 的控制框图如图 4 所示,i b.re f 为储能变
dt
流器输出电流 i 的参考值;T 为 1 阶惯性环节的
b
C vir0 , du dc <x 时间常数。
dt
C vir = (8)
k b 2.3 HESS 的模糊下垂控制策略
du dc du dc ≥x
,
dt dt HESS 主要采用下垂控制策略,但 SOH 过高
C vir0 +k a
24