
Page 272 - 《振动工程学报》2026年第5期
P. 272
1476 振 动 工 程 学 报 第 39 卷
求取齿轮泵的辐射噪声。如图 9 所示,以齿轮泵原
x 加速度传感器 数据采集器
点为中心,设置半径为 1 m 的半球场点网格,在齿轮 (LMS SCADAS)
z y
泵泵体前方和后方、泵体上方和左右方设置坐标为 o
(0,0,1)、(0,0,−1)、(−1,0,0)、(1,0,0)、(0,1,0) 的 5 个场点, 测点1 测点3
测点2
在泵体底部距离地面 0.3 m 的位置设置一个对称面, 测点4
以模拟一个完全反射声波的表面。同时,在距离齿
轮后泵体后方 0.3 m 处设置一个面场点网格,方便与 测点5
笔记本
声源定位试验得出的结果进行对比分析。 (ThinkPad notebook)
半球包络面网格 摄像头
笔记本
齿轮泵 (ThinkPad notebook)
场点4
三脚架
信号采集器422(左)
场点5
信号调理器MFSC(右)
场点2
场点1
1
进口 出口
管路 管路
面场点网格
3
PU
对称面 2 探头 测试泵 摄像头
场点3 Z
Y X
图 9 齿轮泵声辐射计算模型 4
Fig. 9 Calculation model of gear pump sound radiation 5
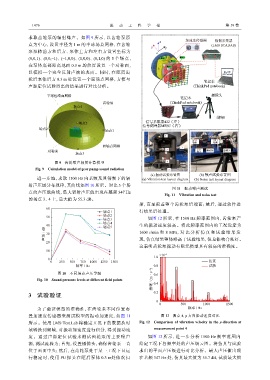
(a) 振动试验布置图 (b) 噪声试验布置图
进一步地,求取 1500 Hz 内基频及其倍频下的辐 (a) Vibration test layout diagram (b) Noise test layout diagram
射声压级分布规律,其曲线如图 10 所示。对比 5 个场
图 11 振动噪声测试
点的声压级曲线,最大辐射声压值出现在基频 347 Hz
Fig. 11 Vibration and noise test
的场点 3、4 上,最大值为 55.3 dB。
描,直至覆盖整个齿轮泵后端面;最后,通过软件进
60
场点1 行结果后处理。
50 场点2 如图 所示,在 1500 Hz 频率范围内,齿轮泵产
场点3 12
场点4
40 场点5 生的振动速度较高。将此频率范围内的工况设定为
声压 / dB 30 1600 r/min 和 8 MPa, 对 比 分 析 仿 真 和 试 验 结 果 发
20 现,仿真结果整体略高于试验结果,但总体吻合良好。
这表明齿轮泵振动有限元模型具有较高的准确度。
10
1.0 ×10 −3
0
0 250 500 750 1000 1250 1500 仿真
频率 / Hz 0.8 试验
振幅 / (m·s −1 )
图 10 不同场点声压等级 0.6
Fig. 10 Sound pressure levels at different field points
0.4
3 试 验 验 证 0.2
0
0 500 1000 1500
为了验证模型的准确性,在齿轮泵不同位置布 频率 / Hz
置加速度传感器来测试模型的振动加速度,如图 11 图 12 测点 4,y 方向振动速度对比
所示。使用 LMS Test.Lab 将稳定工况下的数据从时 Fig. 12 Comparison of vibration velocity in the y-direction at
域转换到频域,对振动加速度进行积分,得到振动速 measurement point 4
度。通过声源定位试验来测试齿轮泵的主要噪声 如图 13 所示,进一步分析 1500 Hz 频率范围内
源,测试流程为:首先,设置摄像头,确保齿轮泵一直 给定工况下各频率处的声压级云图。将仿真与试验
位于画面中央;然后,在齿轮泵处于某一工况下且运 求出的平面声压级进行对比分析。最大声压值出现
行稳定时,使用 PU 探头在距后泵体 0.3 m处依次扫 在基频 347 Hz 处,仿真最大值为 55.7 dB,试验最大值