
Page 218 - 《振动工程学报》2026年第2期
P. 218
534 振 动 工 程 学 报 第 39 卷
旋转轴 −1
A / (Wb·m )
9.3306×10 −5
8.7092×10 −5
8.0877×10 −5
7.4663×10 −5
6.8449×10 −5
6.2234×10 −5
5.6020×10 −5
4.9806×10 −5
4.3592×10 −5
3.7377×10 −5
3.1163×10 −5
2.4949×10 −5
1.8734×10 −5
1.2520×10 −5
6.3059×10 −6
B / T
1.8725×10 0
1.7554×10 0
1.6384×10 0
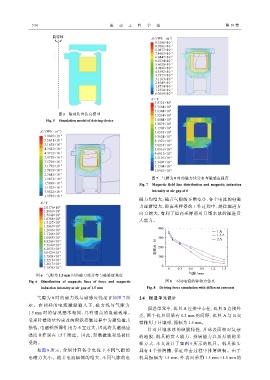
图 5 驱动装置仿真模型 1.5214×10 0
Fig. 5 Simulation model of driving device 1.4044×10 0
1.2873×10 0
1.1703×10 0
−1
A / (Wb·m ) 1.0533×10 0
5.9605×10 −5 9.3624×10 −1
5.5631×10 −5 8.1921×10 −1
5.1658×10 −5 7.0218×10 −1
4.7685×10 −5 5.8516×10 −1
4.3712×10 −5 4.6813×10 −1
3.9738×10 −5 3.5110×10 −1
3.5765×10 −5 2.3407×10 −1
3.1792×10 −5 1.1704×10 −1
2.7819×10 −5 1.6961×10 −5
2.3845×10 −5
1.9872×10 −5 图 7 气隙为 0 时的磁力线分布与磁感应强度
1.5899×10 −5 Fig. 7 Magnetic field line distribution and magnetic induction
1.1925×10 −5
7.9522×10 −6 intensity at air gap of 0
3.9789×10 −6
磁力均增大;随着气隙的不断变小,各个电流的电磁
B / T
2.0170×10 0 力逐渐增大,即在采样器的工作过程中,越往掘进方
1.8909×10 0 向力越大,有利于提高采样器对月壤水冰的掘进贯
1.7648×10 0
1.6388×10 0 入能力。
1.5127×10 0
1.3867×10 0
1.2606×10 0 400 1 A
1.1346×10 0 1.5 A
1.0085×10 0 300 2 A
8.8246×10 −1
7.5640×10 −1
6.3035×10 −1 电磁力 / N 200
5.0429×10 −1
3.7824×10 −1 100
2.5218×10 −1
1.2613×10 −1
7.1838×10 −5 0
0 0.3 0.6 0.9 1.2 1.5
气隙 / mm
图 6 气隙为 1.5 mm 时的磁力线分布与磁感应强度
Fig. 6 Distribution of magnetic lines of force and magnetic 图 8 不同电流的驱动力仿真
induction intensity at air gap of 1.5 mm Fig. 8 Driving force simulation with different currents
气隙为 0 时的磁力线与磁感应强度 B 如图 7 所 2.4 掘进单元设计
示 。 在 同 样 的 电 流 激 励 输 入 下, 磁 力 线 与 气 隙 为
掘进单元中,机具 A 连接中心柱,机具 B 连接外
1.5 mm 时的情况基本相同,具有很高的电磁效率。
壳,两个机具间留有 0.2 mm 的间距,机具 A 与 B 交
受采样器质量约束及两衔铁接触过程中为避免撞击
错作用于月壤时,振幅为 1.5 mm。
损伤,电磁铁所需作用力不宜过大,因此将其磁感应 针对月壤水冰的硬脆特性,月球表面相对复杂
强度 B 控制在 1.5 T 附近。因此,轻微磁饱和是被接 的地貌,机具的贯入能力、排屑能力以及月壤的采
受的。 样方式,本文设计了如图 9 所示的机具。机具锥头
如图 8 所示,分别计算各个电流下不同气隙的 具有 4 个排屑槽,保证冲击过程中排屑顺畅。由于
电磁力大小。随着电流幅值的增大,不同气隙的电 机具振幅为 1.5 mm,外表面采用 1.5 mm ×1.5 mm 的