
Page 163 - 《武汉大学学报(信息科学版)》2025年第9期
P. 163
第 50 卷第 9 期 刘梓航等:联合全局-局部特征和动态错误监督的遥感影像建筑物损伤评估方法 1891
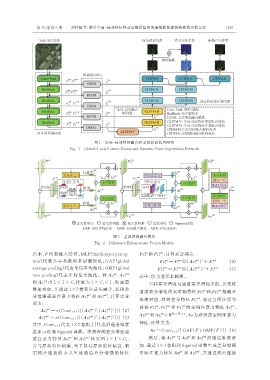
图 1 全局-局部特征融合和动态错误监督网络
Fig. 1 Global-Local Feature Fusion and Dynamic Error Supervision Network
图 2 差异增强融合模块
Fig. 2 Difference Enhancement Fusion Module
post
pre
式中, F 代表输入特征; MLP (multi-layer percep⁃ Fc i 和 Fc i ,计算式分别为:
pre′ T
pre
pre
tron)代 表 共 享 参 数 的 多 层 感 知 机 ; GAP (global Fc i = F i ⊗ ( Ac i ) + F i pre (4)
average pooling)代表全局平均池化; GMP (global Fc i post = F i post ⊗ ( Ac i post′ T post (5)
) + F i
pre post
max pooling)代表全局最大池化。将 Ac i 、 Ac i 式中, ⊗ 为逐元素相乘。
和 Ac i 由 1 × 1 × C i 转 置 为 1 × C i × 1,沿 通 道 空间差异增强与通道差异增强类似,首先将
sub
维度叠加,并通过 1×7 卷积自适应融合,获得差
pre
通道差分增强的双时相特征 Fc i 和 Fc i post 相减并
pre′ post′
分增强通道注意力特征 Ac i 和 Ac i ,计算式分
取绝对值,获得差分特征 Fc i ,通过空间注意力
sub
别为:
sub
pre
pre post 和 Fc i 的空间注意力特征 As i ,
获得 Fc i , Fc i
T
T
Ac i = σ ( Conv 1 × 7 ( [( Ac i ) ,( Ac i ) ] ) ) (2)
pre′
sub
pre
sub
post 和 As i ∈ R H i × W i × 1 , As 为获得的空间注意力
post′ post T sub T As i
Ac i = σ ( Conv 1 × 7 ( [( Ac i ) ,( Ac i ) ] ) ) (3)
式中, Conv 1 × 7 代表 1×7 卷积; [ ]代表沿通道维度 特征,计算式为:
叠加; σ 代表 Sigmoid 函数。将获得的差分增强通 As = Conv 7 × 7 ( [ GAP( F ),GMP( F ) ] ) (6)
pre′ post′ 转 置 回 1 × 1 × C i, sub pre post 沿通道维度叠
道 注 意 力 特 征 Ac i 和 Ac i 然后,将 As i 与 As i 和 As i
并与原始特征相乘,为了保持原始特征信息,利 加,通过 3×3 卷积和 Sigmoid 函数生成差分增强
用 残 差 连 接 的 方 式 生 成 通 道 差 分 增 强 的 特 征 空间注意力特征 As i 和 As i post′ ,并通过残差连接
pre′