
Page 109 - 《武汉大学学报(信息科学版)》2025年第6期
P. 109
第 50 卷第 6 期 朱 军等:结构语义特征约束的地震灾害 AR 场景精准建模方法 1131
1.4.2 地震灾害现场 AR 融合建模 根据解算的用户高精度位姿,进行用户位姿在虚
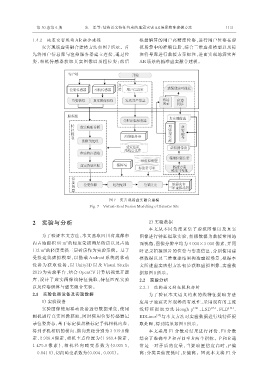
灾害现场虚实融合建模方法如图 7 所示。首 拟场景中的准确注册,综合三维虚拟模型以及标
先将用户信息库与渲染服务器建立连接,通过位 注符号库进行救援方案标注,进而实现地震灾害
姿、相机传感器获取真实图像以及粗位姿;然后 AR 场景的精准虚实融合建模。
图 7 灾害现场虚实融合建模
Fig. 7 Virtual-Real Fusion Modelling of Disaster Site
2 实验与分析 2) 实验数据
本文从不同角度采集了虚拟图像以及真实
为了验证本文方法,本文选取四川省成都市 图像进行特征提取实验,拍摄数据为救援常用地
内占地面积 60 m 的轻度受损两层砖房以及占地 面视角,图像分辨率均为 4 000×3 000 像素,并同
2
112 m 的轻度受损三层砖房作为实验案例。基于 时记录拍摄照片的位姿与姿态信息,分别使用建
2
受损建筑虚拟模型,以搭载 Android 系统的移动 模数据以及三维重建结果构造虚拟场景,根据本
设 备 为 获 取 设 备 ,以 Unity3D 以 及 Visual Studio 文所述虚实映射方法初步获取虚拟图像,实验数
2019 为实验平台,结合 OpenCV 计算机视觉开源 据如图 8 所示。
库,设计了虚实图像线特征提取、特征匹配实验 2.2 实验分析
以及位姿解算与虚实融合实验。 2.2.1 结构语义特征提取分析
2.1 实验仪器设备及实验数据 为了验证本文语义约束的线特征提取方法
1) 实验设备 应用于地震灾害现场的有效性,采用现有的主流
实验图像使用移动设备进行数据采集,使用 线 特 征 提 取 方 法 Hough_p [24] 、LSD [25] 、FLD [26] 、
相机进行真实图像获取,同时使用位姿传感器记 EDLines [27] 与本文方法对实验数据进行线特征提
录位姿姿态,基于标定棋盘格标定手机相机内参, 取处理,得到结果如图 9 所示。
得到手机相机的横向、纵向焦距分别为 3 919.8 像 本文采用 F1 分数对结果进行评价,F1 分数
素、2 926.4 像素,相机主点位置为(1 969.4 像素, 综合了准确率 P 和召回率 R 两个指标。P 和 R 通
1 475.9 像 素),相 机 径 向 畸 变 系 数 为(0.005 5, 常是一对矛盾的度量,当提取置信度高时,P 偏
−0.041 0),切向畸变系数为(0.004, 0.005)。 高;分类置信度低时,R 偏高。因此本文将 F1 分