
Page 252 - 《软件学报》2025年第12期
P. 252
童翰文 等: 带有差异化机制的多视角归纳式知识图谱补全框架 5633
本文首先将每个实体的名称和描述拼接起来, 并将其输入到一个预训练语言模型中, 得到实体的初始表示. 之后,
本文使用 3 个模块, 通过从多个视角聚合互补的信息来丰富实体的表示: (1) 结构编码模块使用关系图卷积网络来
l
E ∈ R |E|×d . (2) 全局编码模块利用一种全局注意力机制来允许知识图谱中任
聚合邻居信息, 获得实体的局部表示
g
何实体之间的语义交互, 从而获得实体的全局表示 E ∈ R |E|×d . 本文设计了一种基于注意力的差异化机制来缓解局
部表示和全局表示之间的过度注意的问题, 避免全局视角聚合和局部视角重叠的信息. (3) 路径编码模块使用一个
带有位置编码的 Transformer [10] 编码层来编码多条实体相关的路径, 并且使用一个类似的差异化机制来聚合路径
s
表示, 从而得到实体的序列表示 E ∈ R |E|×d . 这种差异化机制同样避免了路径视角聚合和局部视角相冗余的信息.
g
s
l
,
最终, 本文融合 E E , E 来得到最终的实体表示 E. 在解码器中, 给定一个三元组 (h,r,t), 本文使用一个基于转移
的模型 RotatE 来基于实体表示 e h ,e t ∈ E 和关系表示 r ∈ R, R ∈ R |R|×3d 给三元组打分. 例如, 对于尾实体预测 (h,r,?),
[11]
本文会计算以每个实体 t i ∈ E 为尾实体时的三元组的分数, 并且预测得分最高的实体作为输出, 如公式 (1) 所示:
argmaxϕ(h,r,t i ), t i ∈ E (1)
其中, ϕ(·,·,·) 表示 RotatE 模型.
e l e g e s 多层感知机 e ϕ (h, r, t)
; ;
融合层 打分解码器
|ε| 2M
L 2008 Summer Tsinghua − V=H p
Olympics University 注意力
Ziyi Zhang 2M
− 矩阵
|ε|
location − K ⊥
d
location place of birth q=e t q =e l
capital of adjoins V=E t 差异化机制 K=H p
Beijing
注意力矩阵 注意力矩阵
Tianjin |ε| Transformer layer
China
1928 Summer Olympics Beijing
|ε| K ⊥
R-GCN United States of America China M
Beijing
Random walk
K=E t 2008 Summer Olympics Australia
d
Q=E t Q =E l
M Beijing Swimming
差异化机制
结构编码模块 全局编码模块 路径编码模块
e t
输入
[CLS] Beijing [SEP] Beijing, sometimes romanized as Peking, is the capital of... [SEP] 预训练语言模型
名称 描述
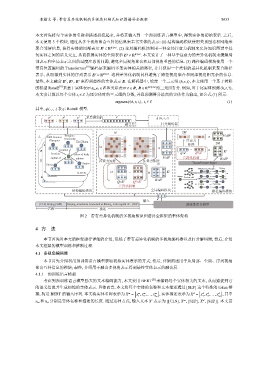
图 2 带有差异化机制的多视角知识图谱补全框架的整体架构
4 方 法
本节首先对本文的框架进行详细的介绍, 包括了带有差异化机制的多视角编码器以及打分解码器; 然后, 介绍
本文框架的模型训练和推断过程.
4.1 多视角编码器
本节首先介绍利用预训练语言模型获取初始实体表示的方式; 然后, 详细阐述用于从局部、全局、序列视角
聚合互补信息的模块; 最终, 介绍用于融合多视角表示得到最终实体表示的融合层.
4.1.1 预训练语言模型
考虑到预训练语言模型强大的文本编码能力, 本文使用 BERT [21] 来编码每个实体相关的文本, 从而捕捉到它
的语义信息并生成初始的实体表示. 具体而言, 本文将每个实体的名称和文本描述通过 [SEP] 这个特殊的 token 拼
[ ] [ ]
接, 构造 BERT 的输入序列. 本文将实体名称表示为 X = x , x ,..., x m n m , 实体描述表示为 X = x , x ,..., x d n d , 其中
d
d
d
m
m
m
2
1
2
1
d
m
′
n m 和 n d 分别是实体名称和描述的长度. 通过这种方式, 输入文本 X 表示为 [[CLS], X , [SEP], X , [SEP]]. 本文首