
Page 96 - 《软件学报》2025年第8期
P. 96
杜德慧 等: 面向自动驾驶系统的场景建模及边缘关键场景生成 3519
规则 1 表示, 如果存在以 n 为源节点的迁移边 迁移到目标节点为 n 的行为节点上, 并且迁移边 上的触发
e
e
′
trigger 取值为 n 将触发状态迁移, 执行动作 act, 改变到车辆状态 n′.
器 true 时, 当前车辆状态
规则 2: 无需事件触发的动作迁移.
′
′
((n ∈ N ∧(∃E n ∧∄trigger)∧ n ⊨ end n ) ⊢ n ∈ N)∧type(n ) ⊨ behaviorNode
.
trigger,act
n (type,t,vars,loc,o) −−−−−−→ n ′ ( type ′ ,t ′ ,vars ′ ,loc ′ ,o )
′
规则 2 表示, 如果存在以 n 为源节点的迁移边 迁移到目标节点为 n 的行为节点上, 并且迁移边 上不存在
e
e
′
触发器 trigger, 当节点 n 达到结束条件时, 当前车辆状态 n 不需要评估 trigger, 即可进行状态迁移, 执行动作 act,
改变到车辆状态 n′.
规则 3: 概率动作迁移.
′′
(((n ∈ N ∧(∃E n ∧T (e) ⊨ trigger)) ⊢ n ∈ N) ∧type(n ) ⊨ branchPoint ∧(n ∈ N ∧∃E n ′)) ⊢ n ∈ N
′
′
′
.
trigger,act,w
n (type,t,vars,loc,o) −−−−−−−→ n ′′
(type ′′ ,t ′′ ,vars ′′ ,loc ′′ ,o ′′ )
规则 3 表示, 如果存在以 n 为源节点的迁移边 迁移到目标节点为 n 的分支节点上, 并且迁移边 上的触发
e
e
′
′
′
器 trigger 取值为 true, 同时存在以 n 为源节点的迁移边 e 迁移到目标节点为 n ′′ 的行为节点上时, 那么当前车辆状
′′
态 n 根据相应迁移边的权重 w, 概率执行相应动作 act, 改变到车辆状态 n . 该语义规则能够有效建模车辆的概率
行为, 可用于分析车辆行为的危险性.
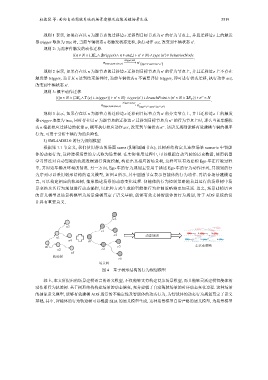
3) SML4ADS2.0 的行为规划模型
根据第 1.1 节定义, 我们使用静态的场面 scene (阴影圆圈节点), 以树形结构定义连续场景 scenario 中智能
体的动态行为, 这种建模场景的方式称为场景树. 在实际使用过程中, 可以根据自动驾驶的历史数据, 使用机器
学习算法对自动驾驶的轨迹数据进行深度挖掘, 构建出其相应的场景树, 这样可以有效建模 Ego 车在行驶过程
中, 其周边车辆及环境的情况. 另一方面, Ego 车的行为规划主要用于描述 Ego 车的行为动作序列, 其规划的行
为序列可以采用树形结构的语义模型, 如图 4 所示, 其中圆圈节点表示智能体的行为动作. 再结合场景建模语
言, 可以构建相应的轨迹树, 抽象描述场景的动态变化过程. 智能体的行为控制策略随着其运行的场景树中场
景变换及其行为规划进行动态编程, 以此种方式生成的智能体行为控制策略将更加灵活. 总之, 场景建模语言
的语义模型及场景树模型为场景建模奠定了语义基础, 能够有效支持智能体的行为规划, 对于 ADS 系统的设
计具有重要意义.
e3
n3
e1
e4 动态规则
n1
n4 e0
n0 e5 车运动策略
n2 e2
n5
轨迹树
e6
场景树
图 4 基于树形结构的行为规划模型
综上, 本文所提出的场景建模语言的语义模型, 不仅能够支持构建复杂场景模型, 而且能够灵活建模智能体的
动作即行为轨迹树. 基于树形结构构建场景的动态演变, 充分建模了自动驾驶场景的时序动态变化过程. 这种场景
的抽象语义模型, 能够有效建模 ADS 场景的不确定性及智能体的动态行为, 为智能体的动态行为规划奠定了语义
基础. 其中, 智能体的行为轨迹树可以根据 SHA 的语义模型生成, 这种场景模型自带严格的语义模型, 为场景模型