
Page 91 - 《软件学报》2025年第8期
P. 91
3514 软件学报 2025 年第 36 卷第 8 期
和 ISO 3450X 标准, 提出了基于本体的场景建模语言 SML4ADS2.0, 增强对复杂自动驾驶场景的建模能力, 并基
于 UPPAAL-SMC 形式化验证与重要性采样技术, 实现边缘关键场景的生成. 该方法有效地解决复杂自动驾驶场
景建模与边缘关键场景生成问题.
① 模型驱动式逻辑场景建模
ASAM
OpenXOntology ISO 3450X 标准
标准
逻辑场景建模
Operational
SML4ADS2.0
design domain
UPPAAL-SMC
验证分析
③ 基于重要性采样的边缘关键场景生成
② 基于 UPPAAL-SMC 的场景评估 关键逻辑场景 输入
重要性采样 输出
概率分布 p(x)
重要性采样
边缘关键场
标记函数 g(x)
景样本集合
MITL
UPPAAL-SMC 边缘关键
specification 提议分布 q(x)
具体场景
关键参数域与
概率分布 p(x)
关键场景 边缘场景
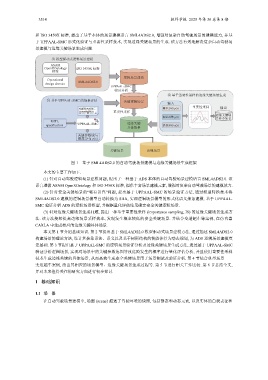
图 1 基于 SML4ADS2.0 的自动驾驶场景建模与边缘关键场景生成框架
本文的主要工作如下.
(1) 针对自动驾驶逻辑场景建模问题, 提出了一种基于 ADS 本体的自动驾驶场景建模语言 SML4ADS2.0. 该
语言遵循 ASAM OpenXOntology 和 ISO 3450X 标准, 提供丰富场景建模元素, 增强对复杂自动驾驶场景的建模能力.
(2) 针对安全关键场景的“稀有诅咒”问题, 提出基于 UPPAAL-SMC 的场景验证方法. 通过模型转换技术将
SML4ADS2.0 建模的逻辑场景模型自动转换为 SHA, 实现逻辑场景模型的形式化语义抽象建模. 基于 UPPAAL-
SMC 验证分析 ADS 的逻辑场景模型, 并根据量化评估结果确定安全关键逻辑场景.
(3) 针对边缘关键场景生成问题, 提出一种基于重要性采样 (importance sampling, IS) 的边缘关键场景生成方
法. 该方法能够提高边缘场景采样效率, 发现发生概率较低的安全关键场景. 并结合变道超车等案例, 在仿真器
CARLA 中生成相应的边缘关键具体场景.
本文第 1 节介绍基础知识. 第 2 节提出基于 SML4ADS2.0 模型驱动式场景建模方法, 通过描述 SML4ADS2.0
构建场景的理论方法, 设计其抽象语法、语义以及基于树形结构的智能体行为动态规划, 为 ADS 逻辑场景建模奠
定基础. 第 3 节提出基于 UPPAAL-SMC 的逻辑场景验证分析及边缘关键场景生成方法, 通过基于 UPPAAL-SMC
验证分析逻辑场景, 实现对场景中的关键参数范围导致危险发生的概率进行量化评估分析, 并且使用重要性采样
技术生成边缘关键的具体场景, 从而高效生成安全关键场景用于场景测试及验证分析. 第 4 节结合典型场景——
变道超车案例, 给出其相应的场景模型、边缘关键场景生成过程等. 第 5 节进行相关工作比较. 第 6 节总结全文,
并对未来值得关注的研究方向进行初步探讨.
1 基础知识
1.1 场 景
在自动驾驶场景建模中, 场面 (scene) 描述了驾驶环境的快照, 包括静态和动态元素, 以及实体的自我表征和