
Page 47 - 《软件学报》2025年第8期
P. 47
3470 软件学报 2025 年第 36 卷第 8 期
坚实的基础. 因此, 在设计一个高效、稳定且安全的单球驱动平衡机器人系统中, 这种验证过程是至关重要的.
4 单球驱动平衡机器人动力学分析及其形式化验证
4.1 单球驱动平衡机器人动力学分析
单球驱动平衡机器人动力学研究的问题是机器人位移、速度和加速度与驱动力之间的关系. 对于机器人动力
学建模问题的分析和研究, 一般有牛顿力学和拉格朗日力学这两种理论. 拉格朗日力学相对于牛顿力学的优点是
只需根据已知条件计算系统的动能、势能和广义力, 求出整个系统的能量函数方程, 不需要分析系统各部件的内
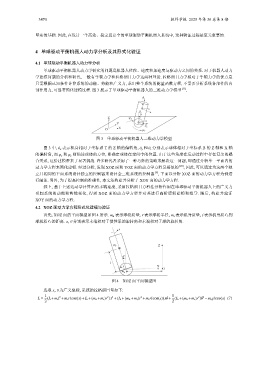
部作用力, 可显著简化建模过程. 图 3 展示了单球驱动平衡机器人的三维动力学模型 [11] .
θ x
θ y
Z j y
Y
θ z
O X
j x
图 3 单球驱动平衡机器人三维动力学模型
图 3 中, θ x 表示机身相对于坐标系 T 的 Z 轴的偏转角, θ y 和 θ z 分别表示球体相对于坐标系 B 的 Z 轴和 X 轴
的偏转角, 而 φ x 和 φ y 则描述球体的方位, 即确定球体在空间中的位置. 由于这些角度在运动过程中存在复杂的耦
合关系, 这给建模带来了显著挑战. 许多研究者采用了一种巧妙的策略来解决这一问题, 即通过分析单一平面内的
动力学方程来简化建模. 经过分析, 发现 XOZ 面和 YOZ 面的动力学方程是相似的 [28] , 因此, 可以通过为这两个独
立且相同的平面系统设计独立的控制器来设计全三维系统的控制器 [9] , 下面以分析 XOZ 面的动力学方程为例进
行阐述. 另外, 为了提高控制的准确性, 本文还构建并分析了 XOY 面的动力学方程.
综上, 基于上述运动学计算出的末端速度, 采用拉格朗日方程法分析作用在单球驱动平衡机器人上的广义力
引起系统的动能和势能变化, 得到 XOZ 面的动力学方程并对其进行高阶逻辑建模和推导. 随后, 构建并验证
XOY 面的动力学方程.
4.2 XOZ 面动力学方程形式化建模与验证
r
l
首先, XOZ 面的平面模型如图 4 所示. m b 表示球轮质量, 表示球轮半径, m t 表示机身质量, 表示机身质心到
球轮质心的距离. x θ , 分别表示末端相对于惯性系的旋转角和末端相对于球的旋转角.
x
Z
m t
θ
l
r X
O
m b
图 4 XOZ 面平面模型图
选取 x θ , 为广义坐标, 系统的拉格朗日量如下:
1 1
L = (I t +m t l +m t rlcos(x)+I b +(m b +m t )r )˙x +(I b +(m b +m t )r +m t rlcos(x))˙x ˙ θ+ (I b +(m b +m t )r ) ˙ θ −m t glcos(x) (7)
2
2
2
2
2
2
2 2