
Page 102 - 《软件学报》2025年第8期
P. 102
杜德慧 等: 面向自动驾驶系统的场景建模及边缘关键场景生成 3525
安全性的关键参数可以得到详细的分析, 并可有针对性地调整其取值范围, 最终帮助设计人员生成多种形式的关
键场景.
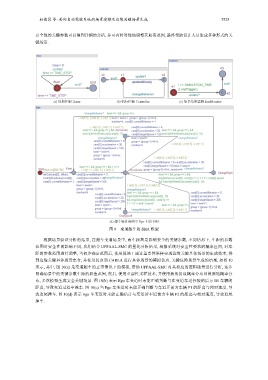
(a) 周期控制 Timer (b) 执行控制 Controller (c) 场景结束监测 EndMonitor
(d) 超车场景案例中 Ego 车的 SHA
图 9 变道超车的 SHA 模型
根据场景验证分析的结果, 在超车变道场景中, 两车距离是影响安全的关键参数, 不同情形下, 车距的参数
范围对安全性的影响不同, 我们结合 UPPAAL-SMC 的量化分析结果, 根据系统对安全性要求的概率区间, 对车
距的参数范围进行调整, 当初步确定范围后, 使用算法 1 通过重要性采样实现边缘关键具体场景的生成技术, 得
到边缘关键具体场景集合, 并使用仿真器 CARLA 进行具体场景的模拟仿真. 关键危险场景生成的结果, 如图 10
所示, 其中, 图 10(a) 是变道超车的正常情况下的模拟, 借助 UPPAAL-SMC 对其相应的逻辑场景进行分析, 逐步
明确场景中的关键参数车距的取值范围, 然后, 使用重要性采样技术, 并使用新的提议概率分布替换原始概率分
布, 多次模拟生成安全关键场景. 图 10(b) 表示 Ego 车变道时未能正确判断与在变道车道行驶的后方 B1 车辆的
距离, 导致变道过程中撞车. 图 10(c) 当 Ego 车变道时未能正确判断与车道正前方车辆 F1 的距离与相对速度, 导
致追尾撞车. 图 10(d) 表示 Ego 车变道时未能正确估计与变道后车道前方车辆 F2 的距离与相对速度, 导致追尾
撞车.