
Page 245 - 《软件学报》2021年第5期
P. 245
曹翰林 等:轨迹表示学习技术研究进展 1469
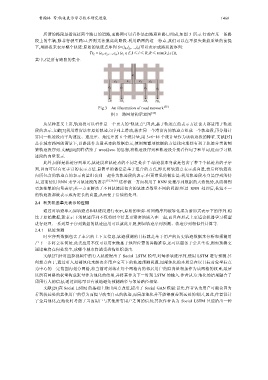
所谓的路段是指连接两个路口的道路,而路网可以看作是由路段和路口组成,如图 3 所示.行驶在某一条路
段上的车辆,除非行驶至路口,否则无法脱离此路段.利用路网的这一特点,我们可以在不损失数据质量的前提
下,用路段来表示整个轨迹:原始的轨迹点序列 S=(l 0 ,l 2 ,…,l k )可以表示成路段的序列:
Tr = E ( , ,...,e e 2 e R ) (e ∈ i E ,1≤≤ , R R ≤ min( ,| |)),k ε
i
1
其中,E是所有路段的集合.
Fig.3 An illustration of road network [35]
图 3 路网结构示意图 [35]
从某种意义上讲,轨迹段可以看作是一个更大的“轨迹点”.因此,基于轨迹点的表示方法也大都适用于轨迹
段的表示.文献[3]利用滑窗法在原始轨迹点序列上滑动,落在同一个滑窗内的轨迹点组成一个轨迹段,再分别计
算同一轨迹段内平均速度、速度差、角度差的 6 个统计量,用 3×6=18 个统计量作为该轨迹段的特征.文献[35]
是在城市路网的背景下,以路段作为最基本的数据单元,使用频繁项挖掘的方法找出那些有利于轨迹分类的频
繁轨迹段序列.文献[10]同样借鉴了 word2vec 的思想,将轨迹段序列和轨迹段分别看作句子和单词,进而学习轨
迹段的向量表示.
此外,同样是轨迹序列单元,轨迹段和轨迹点的不同之处在于:轨迹段本身就是包含了若干个轨迹点的子序
列,因而可以有更丰富的表示方法.最简单的做法是基于组合的方式,即先将轨迹点表示成向量,然后将轨迹段
内所包含的轨迹点的表示向量组合到一起作为轨迹段的表示.但更常见的做法是:利用轨迹段本身是序列的特
点,进而使用 RNN 来学习轨迹段的表示 [15,16,36] .这样做一方面利用了 RNN 处理序列数据的天然优势,从而得到
更加抽象的向量表示;另一方面解决了不同轨迹段包含的轨迹点数量不同的问题:经过 RNN 处理后,长短不一
的轨迹段都被表示成为定长的向量,从而便于后续的处理.
2.4 有关轨迹单元表示的应用
通过对轨迹单元如轨迹点和轨迹段进行表示,原始的坐标-时间戳序列被转化成为新形式表示下的序列.相
比于原始数据,新表示下的轨迹序列不仅将时空信息更紧密地嵌入在一起,而且在形式上更适合机器学习模型
进行处理.一系列基于序列数据的轨迹应用可以就此开展,例如轨迹序列预测、轨迹序列相似性计算等.
2.4.1 轨迹预测
时空序列数据包含了丰富的上下文信息,轨迹预测的目标就是基于用户的历史轨迹数据来分析和预测用
户下一步将去往何处.此类应用不仅可以用来做基于地理位置的兴趣推荐,还可以服务于公共生活,例如预测交
通堵塞将在何处发生,或哪个城市将遭受恐怖组织袭击.
文献[27]针对监控视频中的行人轨迹提出了 Social LSTM 模型,对每条轨迹序列,使用 LSTM 进行预测.其
创新点在于,通过引入局部池化来解决多用户交互下的轨迹预测问题.局部池化的本质是在以目标对象坐标点
为中心的一定范围内划分网格,将当前时刻落在每个网格内的邻居用户的隐向量相加作为该网格的权重,最后
以所有网格的权重构成张量作为池化的结果,并将其作为下一时刻 LSTM 的输入.作者认为:池化的结果融合了
周围行人的信息,通过训练可以有效地避免预测路径与邻居路径相撞.
文献[28]在 Social LSTM 的基础上做出两点改进,提出了 Social GAN 模型:首先,作者认为用户可能会因为
看到较远处的其他用户的行为而提早改变自己的轨迹,而局部池化并不能够覆盖到远处的邻居,因此,作者设计
了全局池化,在池化时考虑了当前用户与其他所有用户之间的信息;其次作者认为 Social LSTM 只能给出一种