
Page 112 - 《摩擦学学报》2021年第1期
P. 112
第 1 期 杨智宏, 等: 基于Mask R-CNN网络的磨损颗粒智能识别与应用 109
The original labels Waer particle labels
(Cars, people, planes ...) (Cutting, Sliding, Rubbing ...)
Classifier Classifier Train
Train
Feature model ldentification Wear particle Feature
extraction Transfer extraction
layer learning layer
Mask R-CNN
Microsoft common objects
Wear particle dataset
in context datasets
(Sample volume: few-shot)
(Sample volume: millions)
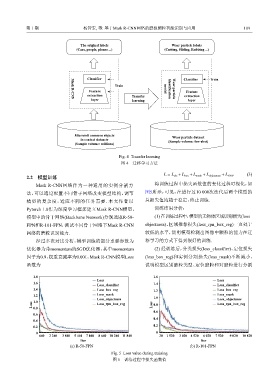
Fig. 4 Transfer learning
图 4 迁移学习方法
(3)
L = L cls + L box + L mask + L objectness + L RPN
2.2 模型训练
Mask R-CNN网络作为一种通用的实例分割方 将训练过程中损失函数值的变化过程可视化,如
法,可以通过配置不同骨干网络改变模型结构,调节 图5所示,可见,在进行过10 000次迭代后两个模型的
模型的复杂度,适应不同的任务需要. 本文作者以 总损失值均趋于稳定,终止训练.
Pytorch 1.0作为深度学习框架建立Mask R-CNN模型, 训练结果分析:
模型中的骨干网络(Backbone Network)分别选取R-50- (1) 在训练过程中,模型的无物体区域识别损失(loss_
FPN和R-101-FPN,测试不同骨干网络下Mask R-CNN objectness)、区域推荐损失(loss_rpn_box_reg)一直处于
网络的磨粒识别能力. 较低的水平,说明模型检测出图像中颗粒的能力在迁
经过多次对比分析,模型训练的部分重要参数为 移学习的方式下得到很好的训练.
优化器为带momentum的SGD优化器,其中momentum (2) 经训练后,分类损失(loss_classifier)、定位损失
因子为0.9,权重衰减率为0.001,Mask R-CNN模型Loss (loss_box_reg)和实例分割损失(loss_mask)不断减小,
函数为 说明模型区别磨粒类型、定位磨粒和对磨粒进行分割
1.8 1.6
Loss Loss
1.6 1.4
Loss_classifier Loss_classifier
1.4 Loss_box_reg 1.2 Loss_box_reg
Loss_mask Loss_mask
1.2
Loss_objectness 1.0 Loss_objectness
1.0
Loss 0.8 Loss_rpn_box_reg Loss 0.8 Loss_rpn_box_reg
0.6
0.6
0.4
0.4
0.2
0.2
0 0
640 2 240 3 840 5 440 7 040 8 640 10 240 11 840 20 1 520 3 020 4 520 6 020 7 520 9 020 10 820
Iter Iter
(a) R-50-FPN (b) R-101-FPN
Fig. 5 Loss value during training
图 5 训练过程中损失函数值