
Page 45 - 《武汉大学学报(信息科学版)》2025年第9期
P. 45
第 50 卷第 9 期 周亚男等:深度时空卷积网络支持的地块尺度作物种植类型分类 1773
图 2 遥感时空融合的地块尺度作物种植类型分类流程
Fig. 2 Flowchart of Parcel-Based Crop Mapping Using Spatial-Temporal Sentinel-2 Images
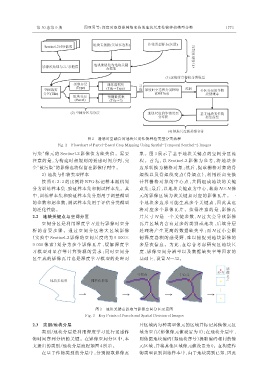
污染”像元的 Sentinel-2 影像值为缺失值。需要 象。图 3 展示了基于地块关键点的空间分区流
注意的是,为构建时相规则的遥感时间序列,完 程 。 首 先 ,以 Sentinel-2 影 像 为 参 考 ,将 地 块 多
全“被污染”的影像也将保留在影像序列中。 边形转换为栅格对象;然后,提取栅格对象的骨
2) 地块与作物类型样本 架 线 以 及 骨 架 线 交 点(骨 架 点),利 用 距 离 变 换
按照 6∶2∶2 的比例将 RPG 标记样本随机划 计 算 栅 格 对 象 的 中 心 点 ,共 同 组 成 地 块 的 关 键
分为训练样本集、验证样本集和测试样本集。其 点集;最后,以地块关键点为中心,裁剪 N×N 像
中,训练样本集和验证样本集分别用于调整模型 元的影像区域为该关键点对应的影像瓦片。一
的参数和超参数,测试样本集用于评估分类模型 个 地 块 多 边 形 可 能 生 成 多 个 关 键 点 ,因 此 其 也
的泛化性能。 将 对 应 多 个 影 像 瓦 片 。 值 得 注 意 的 是 ,影 像 瓦
2.2 地块关键点与空间分区 片 尺 寸 N 是 一 个 关 键 参 数 ,N 过 大 会 导 致 影 像
空间分区是利用深度学习进行影像时空分 瓦 片 区 域 内 含 有 过 多 的 类 别 或 地 块 ,后 续 分 层
析 的 首 要 步 骤 。 通 过 空 间 分 区 将 大 区 域 影 像 处 理 将 产 生 更 高 的 数 据 缺 失 率 ;而 N 过 小 会 限
(实验中 Sentinel-2 影像的空间尺度约为 9 000× 制 深 度 卷 积 的 感 受 野 ,难 以 捕 捉 到 地 块 影 像 的
9 000 像 素)划 分 为 多 个 影 像 瓦 片 ,缓 解 深 度 学 多 层 次 信 息 。 为 此 ,在 综 合 考 虑 研 究 区 地 块 尺
习 模 型 对 显 存 等 计 算 资 源 的 需 求 ;同 时 空 间 分 度 、影 像 空 间 分 辨 率 以 及 数 据 缺 失 率 等 因 素 的
区生成的影像瓦片也是深度学习模型的处理对 基础上,设置 N=32。
图 3 地块关键点提取与影像空间分区示意图
Fig. 3 Key Points of Parcels and Spatial Division of Images
2.3 类别/地块分层 片区域内每种类型像元的区域并标记其他像元区
类别/地块分层是利用深度学习进行遥感作 域为空白(影像像元值设置为 0);在地块分层中,
物时间序列分析的关键。在影像空间分区中,本 则依据地块编码(如地块序号)提取编码相同的像
文提出的类别/地块分层流程如图 4 所示。 元区域,并将其他区域像元值设置为 0。在构建作
在基于作物类别的分层中,分别提取影像瓦 物类型识别训练样本中,由于地块类别已知,因此