
Page 248 - 《水产学报》2026年第3期
P. 248
3 期 李坤达,等:基于改进 YOLOv11 的海洋牧场中鲍的检测方法 50 卷
1.0
表 2 模型性能对比
Tab. 2 Model performance comparison
模型
models mAP@0.5 P R mAP@0.5:0.95 FPS YOLOv11-AMSTAR
mAP@0.5 0.5 Faster R-CNN
Faster R-CNN 90.72 97.56 82.92 73.16 51 YOLOv11
RT-DETR 92.55 98.38 83.59 72.39 50 RT-DETR
SSD
SSD 92.14 98.52 84.79 71.92 43 YOLOv5
YOLOv7
YOLOv5 91.66 99.40 84.85 70.52 62 YOLOv8
YOLOv10
YOLOv7 90.11 96.30 83.24 72.38 77 YOLOv12
0
YOLOv8 91.56 99.50 86.85 71.96 100
50 100 150 200
YOLOv10 92.08 97.85 84.95 73.21 99 训练次数
epoch
YOLOv12 93.58 98.82 87.62 72.01 110
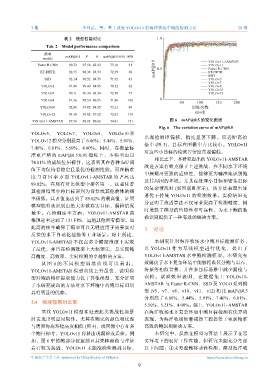
YOLOv11-AMSTAR 97.58 99.82 89.62 74.01 121 图 6 mAP@0.5 的变化曲线
Fig. 6 The variation curve of mAP@0.5
YOLOv5、 YOLOv7、 YOLOv8、 YOLOv10 和
出现检测框偏移,精度显著下降。而远距离拍
YOLOv12 模型分别提高了 6.86%、5.44%、5.91%、
摄中 (图 5),目标在图像中占比较小。YOLOv11
7.46%、6.01%、5.50%、4.00%。同时,在衡量标
对这些小目标的检测置信度普遍偏低。
准更严格的 mAP@0.5:0.95 指标上,本模型也以
相比之下,本研究提出的 YOLOv11-AMSTAR
74.01% 的成绩位居榜首,这表明其在各种 IoU 阈
改进方案有效克服了上述挑战,在不同水下环境
值下均保持着稳定且最优的检测性能。而在精准
中展现出更强的适应性,能够更为精准地识别鲍
度 与 召 回 率 方 面 YOLOv11-AMSTAR 的 P 高 达
及其周围的环境。尤其在处理小目标和密集目标
99.82%,在所有对比模型中排名第一,这意味着
的复杂情况时 (如图版Ⅲ所示),该方法表现出显
其检测结果中将目标误判为背景或其他物体的概
著优于传统 YOLOv11 的检测效果。实验结果充
率极低。其 R 值也达到了 89.62% 的最高值,证明
分证明了改进算法不仅显著提高了检测精度,同
模型能有效识别出绝大多数真实目标,漏检情况
时增强了模型的鲁棒性和可靠性,为水下鲍的准
最少。在检测速率方面:YOLOv11-AMSTAR 的
确识别提供了一种有效的解决方案。
推理速率达到了 121 FPS,远超其他所有模型。如
此高的帧率确保了模型可以无缝应用于需要实时 3 讨论
反馈的水下自动化捕捞等工业场景。综上所述,
YOLOv11-AMSTAR 不仅在多个精度维度上实现 本研究针对海洋牧场水中鲍目标检测任务,
了最优,并且在检测效率上大幅领先,是实现鲍 以 YOLOv11 作 为 基 线 模 型 进 行 优 化 , 提 出 了
高精度、高效率、实时检测的卓越解决方案。 YOLOv11-AMSTAR 水中鲍检测模型。本研究有
从 图 6 的 不 同 模 型 训 练 曲 线 可 以 看 出 , 效解决了水下复杂环境中能够精准区分鲍与岩石、
YOLOv11-AMSTAR 模型曲线上升最快,说明模 海藻等相似背景,并在多目标场景中减少漏检与
型对鲍的特征提取能力优于其他模型,充分证明 误检。试验效果表明,在数据集上 YOLOv11-
了本研究提出的方法对水下环境中的鲍目标识别 AMSTAR 与 Faster R-CNN、SSD 及 YOLO 系列模
具有明显的优势。 型 (v5、v7、v8、v10、v11、v12) 相比 mAP@0.5
分别高了 6.86%、5.44%、5.91%、7.46%、6.01%、
2.4 检测效果对比图
5.50%、5.21%、4.00%。综上,YOLOv11- AMSTAR
基线 YOLOv11 模型在处理此类挑战性场景 在海洋牧场水下复杂环境中鲍目标检测有优异的
时表现出明显局限性。尤其在鲍壳的颜色和纹理 表现,为海洋牧场智慧捕捞工程提供了更加精准
与周围海底环境高度相似 (图 4),或图像中存在多 高效的鲍识别解决方案。
个鲍目标时,YOLOv11 容易出现漏检或误检。例 本研究中,虽然在模型与算法上展示了在恶
如,图 6 中的鲍部分被遮挡且其壳体颜色与背景 劣环境下的良好工作性能,但研究未能充分考虑
岩石较为接近,YOLOv11 未能准确检测到目标, 以下问题:①未考虑鲍移动性检测,模型海洋牧
中国水产学会主办 sponsored by China Society of Fisheries https://www.china-fishery.cn
9