
Page 402 - 《软件学报》2025年第12期
P. 402
李洁 等: 历史交通数据驱动的 VANET 智能路由算法 5783
车辆节点
D RSU D
车辆 源车辆
V2R 目的节点
V2V
Agent
R
S
S
G g
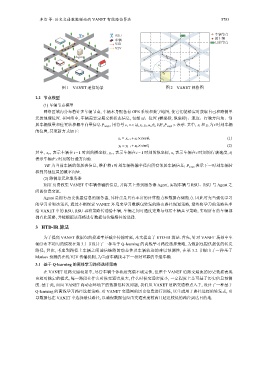
图 1 VANET 通信场景 图 2 VANET 网格图
2.2 节点模型
(1) 车辆节点模型
网络区域内分布着许多车辆节点, 车辆本身配备有 GPS 系统和数字地图, 使它们能够实时获取自己和路侧单
元的地理位置. 在网络中, 车辆需要定期交换状态信息, 包括 id、位置 (横坐标, 纵坐标)、速度、行驶方向角、邻
t
t
居车辆数量和位置转移概率向量信息 P neigh , 用符号 v i =< id, x t ,y t ,u t ,θ t ,VR ,P neigh > 表示. 其中, x t 和 y t 为 时刻车辆
的位置, 其更新方式如下:
(1)
x t = x t−1 +u t ×cosθ t
(2)
y t = y t−1 +u t ×sinθ t
其中, x t−1 表示车辆在 t −1 时刻的横坐标, y t−1 表示车辆在 t −1 时刻的纵坐标, u t 表示车辆在 时刻的行驶速度, θ t
t
表示车辆在 t 时刻的行驶方向角.
t
t
VR 为当前车辆的邻居表信息, 维护着 时刻车辆传输半径内所有邻居车辆信息; P neigh 表示下一时刻车辆转
移到其他位置的概率向量.
(2) 路侧单元和服务器
RSU 负责收集 VANET 中车辆传输的信息, 并将其上传到服务器 Agent, 实现车辆与 RSU、RSU 与 Agent 之
间的信息交流.
Agent 是拥有历史流量信息的服务器, 其特点是具有丰富的计算能力和数据存储能力. 因此可充当强化学习
的学习者和决策者, 通过不断探索 VANET 环境来学习数据包转发的路由路径规划策略, 最终将学习的策略共享
给 VANET 中的 RSU, RSU 再将策略传递给车辆, 车辆之间可通过定期与邻居车辆共享策略, 实现所有的车辆都
拥有此策略, 并能根据该策略进行数据包传输路径的选择.
3 HTD-IR 算法
为了提高 VANET 数据包的投递率并减少传输时延, 本文提出了 HTD-IR 算法. 首先, 针对 VANET 场景中车
辆分布不均匀的情况在第 3.1 节设计了一种基于 Q-learning 的离线学习路径选择策略, 为数据包提供最优的转发
路径; 其次, 考虑到路径上车辆之间通信链路的动态性及车辆轨迹的难以预测性, 在第 3.2 节提出了一种基于
Markov 预测的在线 V2V 传输机制, 为当前车辆找寻下一相对可靠的中继车辆.
3.1 基于 Q-learning 的离线学习路径选择策略
在 VANET 道路交通场景中, 尽管车辆个体轨迹充满不确定性, 但整个 VANET 道路交通流的历史数据表现
出相对稳定的模式, 每一路段在什么时候交通密度大, 什么时候交通密度小, 一定程度上是可基于历史信息预测
的. 基于此, 面向 VANET 高动态环境下的数据包转发问题, 我们从 VANET 道路交通特点入手, 设计了一种基于
Q-learning 的离线学习路径选择策略. 对 VANET 交通网的历史信息进行训练, 以生成用于路径选择的转发表, 引
导数据包在 VANET 中选择最佳路径, 以确保数据包经由交通密度较高且延迟较低的路径到达目的地.