
Page 282 - 《软件学报》2025年第8期
P. 282
何贤浩 等: 面向天河新一代超算的大规模平行城市交通仿真 3705
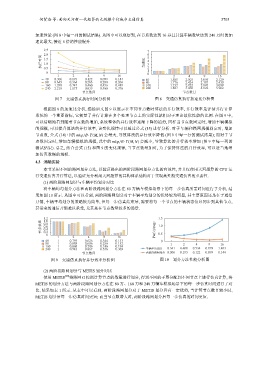
加速性能 (图 8 中每一列的测试结果). 从图中可以观察到, 在节点数达到 16 并且计算车辆数量达到 240 万时的加
速比最大, 接近 6 倍的性能提升.
2.5
7
2.0 6 5
执行时间 1.5 加速比 4 3
1.0
0.5
1 2
0 0
1 2 4 9 16 1 2 4 9 16
40 0.306 0.193 0.122 0.099 0.144 40 1 1.585 2.503 3.095 2.129
80 0.645 0.364 0.266 0.280 0.266 80 1 1.776 2.424 2.307 2.430
160 1.298 0.747 0.460 0.456 0.419 160 1 1.737 2.822 2.847 3.099
240 2.218 1.175 0.639 0.460 0.376 240 1 1.887 3.468 4.822 5.902
节点数目 节点数目
图 7 交通仿真执行时间分析图 图 8 交通仿真执行加速比分析图
根据图 8 的加速比分析, 描绘后文图 9 以展示在不同节点数时算法的并行效率, 并行效率是评估并行计算
系统的一个重要指标, 它衡量了并行计算在多个处理节点上的实际性能相对于理论最优性能的比例. 在图 9 中,
可以清晰地看到随着节点数的增加, 系统整体的并行效率逐渐下降的趋势, 同样当节点数固定时, 增加车辆模拟
的规模, 可以提升算法的并行效率, 该变化规律可以通过公式 (15) 进行分析. 对于车辆和路网规模固定时, 增加
节点数, 公式 (14) 中的 mkp/B·T(M,N) 会增大, 导致算法的并行效率降低 (图 9 中每一行的测试结果); 而对于节
mkp/B·T(M,N) 会减小, 导致算法的并行效率增加 (图 9 中每一列的
点数固定时, 增加车辆模拟的规模, 式中的
测试结果). 总之, 结合公式 (15) 和图 9 的变化规律, 当节点数增加时, 为了保持算法的并行效率, 可以适当地增
加仿真数据的规模.
4.3 消融实验
本节采用不同的路网划分方法, 以验证提出的两阶段路网划分方法的有效性, 并且仅使用天河超算的 CPU 运
行交通仿真并行算法, 以验证充分利用天河超算的异构体系结构对于实现高性能交通仿真的重要性.
(1) 两阶段路网划分与车辆平均划分对比
将车辆均匀划分方法和两阶段路网划分方法在 80 万辆车模拟场景下的每一步仿真所需时间进行了分析, 结
果如图 10 所示. 从图中可以看到, 两阶段路网划分对于车辆平均划分的优势较为明显, 其主要原因还是在于通信
开销, 车辆平均划分的策略较为简单, 但每一步仿真结束后, 需要将每一个节点的车辆状态信息同步到其他节点,
其带来的通信开销难以承受, 尤其是在节点数量较多的场景.
1.2 1.5
1.0
节点效率 0.8 Perf (s/step) 1.0
0.6
0.4
0.2
0 0.5
1 2 4 9 16
40 1 0.793 0.626 0.344 0.133 0
80 1 0.888 0.606 0.256 0.152 1 2 4 9 16
160 1 0.868 0.706 0.316 0.194
240 1 0.943 0.867 0.536 0.369 车辆平均划分 0.341 0.408 0.534 0.879 1.403
节点数目 两阶段路网划分 0.306 0.193 0.122 0.099 0.144
图 9 交通仿真执行并行效率分析图 图 10 划分方法性能分析图
(2) 两阶段路网划分与 METIS 划分对比
使用 METIS [28] 将路网 G 按照计算节点的数量进行划分, 得到不同的子图分配到不同节点上进行仿真计算, 将
METIS 的划分方法与两阶段路网划分方法在 80 万、160 万和 240 万辆车模拟场景下的每一步仿真时间进行了对
比, 结果如表 1 所示. 从表中可以看到, 两阶段路网划分对于 METIS 划分具有一定优势, 当计算节点数目较少时,
METIS 划分后每一步仿真时间更短; 而当节点数增大时, 两阶段路网划分后每一步仿真的时间更短.