
Page 274 - 《软件学报》2025年第8期
P. 274
何贤浩 等: 面向天河新一代超算的大规模平行城市交通仿真 3697
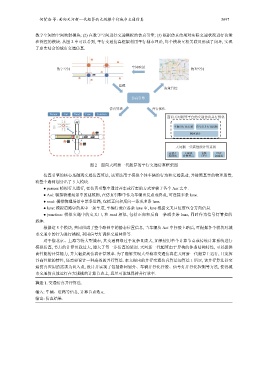
数字空间的空间映射模块; (2) 在数字空间进行交通模拟的仿真引擎; (3) 根据仿真结果对实际交通状况进行决策
和管控的模块. 从图 2 中可以看到, 平行交通仿真框架利用平行城市理论, 每个模块互相关联且形成了闭环, 实现
了虚实结合的城市交通仿真.
空间映射
数字空间 物理空间
建模
决策管控
仿真引擎
仿真算法 并行优化
Person Aoi Road Lane Junction
面向天河超算平台的交通仿真并行优化
车辆并行化行驶 信号灯并行化控制
路网划分
天河新一代高性能计算系统
高速互 大规模 多核 DSP
联网络 计算节点 CPU 加速器
图 2 面向天河新一代超算的平行交通仿真框架图
仿真引擎的核心是微观交通仿真算法, 该算法用于模拟个体车辆的行为和交通流动, 并按照真实的物理场景,
将整个路网划分出了 5 大模块.
● person: 模拟行人通行, 在仿真引擎中通过开车或行走的方式穿梭于各个 Aoi 之中.
● Aoi: 模拟物理场景中的建筑物, 在仿真引擎中作为车辆出发点或终点, 可连接多条 lane.
● road: 模拟物理场景中某条道路, 包括正向和反向一条或多条 lane.
● lane: 模拟道路中的其中一条车道, 车辆行驶在各条 lane 中, lane 根据交叉口位置包含方向信息.
● junction: 模拟交通中的交叉口, 和 road 相似, 包括正向和反向一条或多条 lane, 同时作为信号灯管控的
载体.
根据这 5 个模块, 共同组成了整个路网中的静态位置信息, 当车辆从 Aoi 中行驶上路后, 可根据各个模块对城
市交通中的行为进行模拟, 利用信号灯调控交通网络等.
对于像北京、上海等特大型城市, 其交通网络过于复杂且庞大, 如果使用单个计算节点或传统计算系统进行
模拟仿真, 节点的计算负载过大, 增大了每一步仿真的延迟. 天河新一代超算由于异构的体系结构特性, 可以提供
高性能的计算能力, 并大幅提高仿真计算效率. 为了能够实现大型城市交通仿真在天河新一代超算上运行, 且发挥
其高性能的特性, 还需要设计一种高效的并行算法. 本文提出的并行交通仿真算法如算法 1 所示, 该并行算法以交
通仿真应用的需求为切入点, 设计并实现了包括路网划分、车辆并行化行驶、信号灯并行化控制等方法, 使得城
市交通仿真能运行在大规模的计算节点上, 且尽可能地保持并行效率.
算法 1. 交通仿真并行算法.
输入: 车辆、道路等信息, 计算节点数 n;
输出: 仿真结果.