
Page 165 - 《软件学报》2024年第6期
P. 165
陈文杰 等: 面向全分布式智能建筑系统应用程序的并行化编译方法 2741
本文将 SwarmL 编译系统和编辑环境集成, 实现了可视化的全分布式智能建筑系统应用程序一体化开发环
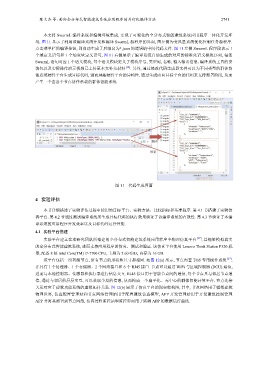
境. 图 11 显示了利用该编译系统开发和编译 SwarmL 源程序的界面, 图左侧为变风量系统优化控制任务源程序.
点击菜单栏的编译按钮, 即自动生成了后缀名为*.json 的逻辑链中间代码文件. 图 11 左侧 SwarmL 程序段表示 1
个域定义语句和 1 个场变量定义语句, 图 11 右侧展示了编译系统自动生成的对应的标准化语义模块序列, 每条
SwarmL 语句对应 1 个语义模块, 每个语义模块定义了模块序号, 类型码, 名称, 输入输出信息. 编译系统工具的安
装包以及实际操作演示视频已上传至本文补充材料 [32] . 另外, 通过修改代码生成器文件可以为不同类型的群体智
能系统硬件平台生成目标代码, 进而屏蔽硬件平台的异构性. 通过生成面向目标平台的代码来支持部署阶段, 从而
产生一个由各个节点协作承载的群体智能系统.
3.60 GHz, 内存为
图 11 代码生成界面
4 实验评估
本节详细描述了实验评估过程中使用的目标平台、实验方法、比较指标和基准程序. 第 4.1 节搭建了实验仿
真平台. 第 4.2 节通过测试编译系统所生成目标代码的执行效果验证了该编译系统的有效性. 第 4.3 节验证了本编
译系统的应用程序开发效率以及目标代码运行性能.
4.1 实验平台搭建
实验平台建立在本研究团队所搭建的全分布式智能建筑系统应用程序半物理仿真平台 [37] , 其能够模拟真实
的全分布式智能建筑系统, 进而支持应用程序的仿真、测试和验证. 该仿真平台使用 Lenovo Think Station P320 机
器, 配备 8 核 Intel Core(TM) i7-7700 CPU, 主频为 16 GB.
该平台包括一组智能节点, 所有节点的形状和尺寸都相同. 如图 12(a) 所示, 节点内置 TOS 专用操作系统 [27] ,
并具有 1 个处理器、1 个存储器、2 个网络接口和 6 个 RJ45 接口. 节点可以通过 WiFi 与区域控制器 (DCU) 通信,
进而与本地控制器、传感器和执行器进行信息交互. RJ45 接口用于智能节点间的通信, 每个节点只与邻居节点通
信, 通过与邻居的层层交互, 可以获取全局的信息, 从而构成一个扁平化、无中心的群体智能计算平台. 节点连接
关系对应于建筑功能系统的虚拟拓扑关系. 图 12(b) 展示了仿真平台的现实架构图, 其中, 节点网络用于模拟建筑
物理世界, 仿真配置管理站和节点网络管理站用于配置建筑仿真模型, APP 开发管理站用于开发建筑控制管理
APP 并将其部署到节点网络, 仿真过程监控站和监控界面用于监测 APP 的数据运行曲线.