
Page 299 - 《软件学报》2021年第6期
P. 299
王颖 等:面向 ROS 的差分模糊测试方法 1873
Algorithm 1 . Input Data Process.
1: Input : msg type ← The message type of CLI;
_
2: Output :type dict {}⋅← A dictionary including basic properties of input parameter.
_
_
_
3: function ROS TYPE TO DICT
_
4: module importlib= .import module (msg _type + '.msg ')
5: ros _ msg loader (module )
_
6: if msg _type = 'array then
'
{ module array array size data threshold〉
7: type _ regexp = 〈 〉〈 〉〈 _ 〉〈 _ }
8: type _ match = type _ regexp .match (msg type )
_
'
9: else if msy _type = 'complex then
10 : type _ regexp = { complex type type size data threshold〈 〉〈 〉〈 _ 〉〈 _ } 〉
11: type _ match = type _ regexp .match (msg type )
_
12 : else
13: type _ regexp = { module type type size data threshold〈 〉〈 〉〈 _ 〉〈 _ } 〉
_
14 : type _ match = type _ regexp .match (msg type )
15: end if
16 : type _ dict = type _ match
17 :end function
Fig.4 Algorithm of input data process
图 4 输入数据处理算法设计图
3.1.2 种子生成
种子生成主要是目标文件按策略处理模块返回的策略进行种子生成,产生测试用例的过程.如图 5 中算法 2
所示,首先创建策略映射函数,将上一模块返回的 ROS 消息字段映射到策略处理模块,并按策略处理模块定义好
的具体策略指导种子生成,如后文图 6 所示.模糊实现过程中调用 map_ros_types(⋅)函数生成随机的测试用例,在
@setting(⋅)装饰器中通过 max_examples 控制随机数的个数.除此之外,完整的测试用例生成之前,文件中的每组
数据使用全局变量添加唯一的序列标识,方便后续过程的种子分析及回溯.
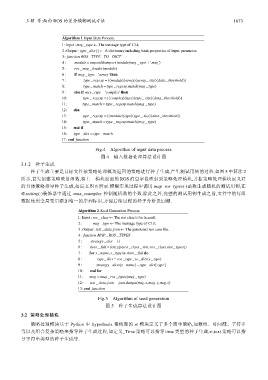
Algorithm 2 .Seed Generation Process.
1: Input : ros clsss ← The ros class to be fuzzed;
_
2: msg _type ← The message type of CLI;
3:Output test data json ← The generated test case file.
.
:
_
_
4: function MAP ROS _TYPES
{}
5: strategy _ dict =⋅
6: slo _ full = list (zip (ros class slot ,ros class .slot types ))
_
ts
_
_
_
7: for s _ name s type in slots _ full do
, _
( _
8: type _ dict = ros _type to dict s type )
_
_
[ _
9: strategy _ dicts s name = _ ['type ']
] type dict
10: end for
_ pe
11: msg = map _ ros types (msg ty )
_
. ,
. )
. ,
12: test _ data json = json .dumps (msg x mag y msg z
.
13:end function
Fig.5 Algorithm of seed generation
图 5 种子生成算法设计图
3.2 策略处理模块
策略处理模块基于 Python 中 hypothesis 策略库的 st 模块定义了多个简单策略,如数组、时间戳、字符串
等以及组合复杂策略来指导种子生成过程,如定义_Time 策略可以指导 time 类型的种子生成,st.text 策略可以指
导字符串类型的种子生成等.