
Page 103 - 《软件学报》2021年第6期
P. 103
陆寅 等:面向 AADL 模型的存储资源约束可调度性分析 1677
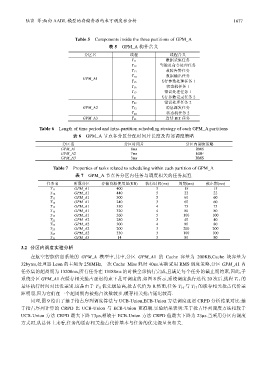
Table 5 Components inside the three partitions of GPM_A
表 5 GPM_A 构件含义
分区名 线程 线程含义
T 11 数据采集任务
T 12 驾驶员命令处理任务
T 13 故障告警任务
T 14 数据输出任务
GPM_A1
T 15 飞行参数处理任务 1
T 16 状态机任务 1
T 17 错误处理任务 1
T 21 飞行参数记录任务 2
T 22 错误处理任务 2
GPM_A2 T 23 消息派发任务
T 24 状态机任务 2
GPM_A3 T 31 连续 BIT 任务
Table 6 Length of time period and intra-partition scheduling strategy of each GPM_A partitions
表 6 GPM_A 节点各分区分配时间片长度及内部调度策略
分区名 分区时间片 分区内调度策略
GPM_A1 8ms RMS
GPM_A2 7ms EDF
GPM_A3 3ms RMS
Table 7 Properties of tasks related to scheduling within each partition of GPM_A
表 7 GPM_A 节点各分区内任务与调度相关的任务属性
任务名 所属分区 存储资源使用量(KB) 执行时间(ms) 周期(ms) 截止期(ms)
T 11 GPM_A1 400 3 15 15
T 12 GPM_A1 440 5 22 22
T 13 GPM_A1 300 5 60 60
T 14 GPM_A1 240 3 60 60
T 15 GPM_A1 330 4 75 75
T 16 GPM_A1 320 4 80 80
T 17 GPM_A1 260 5 100 100
T 21 GPM_A2 280 3 40 40
T 22 GPM_A2 300 4 80 80
T 23 GPM_A2 200 3 200 200
T 24 GPM_A2 330 3 100 100
T 31 GPM_A3 14 3 80 80
3.2 分区内调度实验分析
在航空智能信息系统的 GPM_A 模型中,其中,分区 GPM_A1 的 Cache 容量为 200KB,Cache 块容量为
32bytes,处理器 Leon 的主频为 250MHz,一次 Cache Miss 耗时 40ns.实验采用 RMS 调度策略,分区 GPM_A1 内
任务集的超周期为 13200ms,所有任务在 13188ms 的时候全部执行完成,且满足每个任务的截止期约束,因此,子
系统分区 GPM_A1 在缓存相关抢占延迟约束下是可调度的.如图 8 所示,系统调度执行迭代 20 次后,线程 T 11 的
最坏执行时间对比没差别.这是由于 T 11 优先级最高,抢占代价为 0.然而,任务 T 16 与 T 17 的缓存相关抢占代价差
距明显,因为它们在一个超周期内被抢占次数较多,缓存相关抢占延迟较高.
同理,图 9 给出了基于抢占序列调度算法与 UCB-Union,ECB-Union 方法调度延迟 CRPD 分析结果对比:基
于抢占序列计算的 CRPD 比 UCB-Union 与 ECB-Union 更准确.实验结果表明:基于抢占序列调度方法相较于
UCB-Union 方法 CRPD 最大下降 73μs,相较于 ECB-Union 方法 CRPD 值最大下降为 23μs.当采用分区内调度
方式时,从总体上来看,任务的缓存相关抢占代价基本与任务的优先级呈负相关.